

-
Products -PCBA Manufacturing RF Connectors RF Cable Assemblys Embedded Antennas External Antennas Positioning Chips and Modules
RF Connectors

RF Cable Assemblys
Embedded Antennas
External Antennas
Positioning Chips and Modules































 Language
Language


Language


The Global Navigation Satellite System (GNSS) has revolutionized how we navigate and understand our world. From smartphone maps to logistics tracking, standard GNSS provides meter-level accuracy, which is sufficient for many consumer applications. However, a vast array of industrial, commercial, and scientific applications demand far greater precision—centimeter-level, or even millimeter-level, accuracy. This need gave rise to Real-Time Kinematic (RTK) technology, a sophisticated differential GNSS technique. Historically, RTK systems were large, expensive, and complex, confined to specialized fields like surveying. The transformative development of the last decade has been the miniaturization and integration of this high-precision technology into a single, compact embedded module.
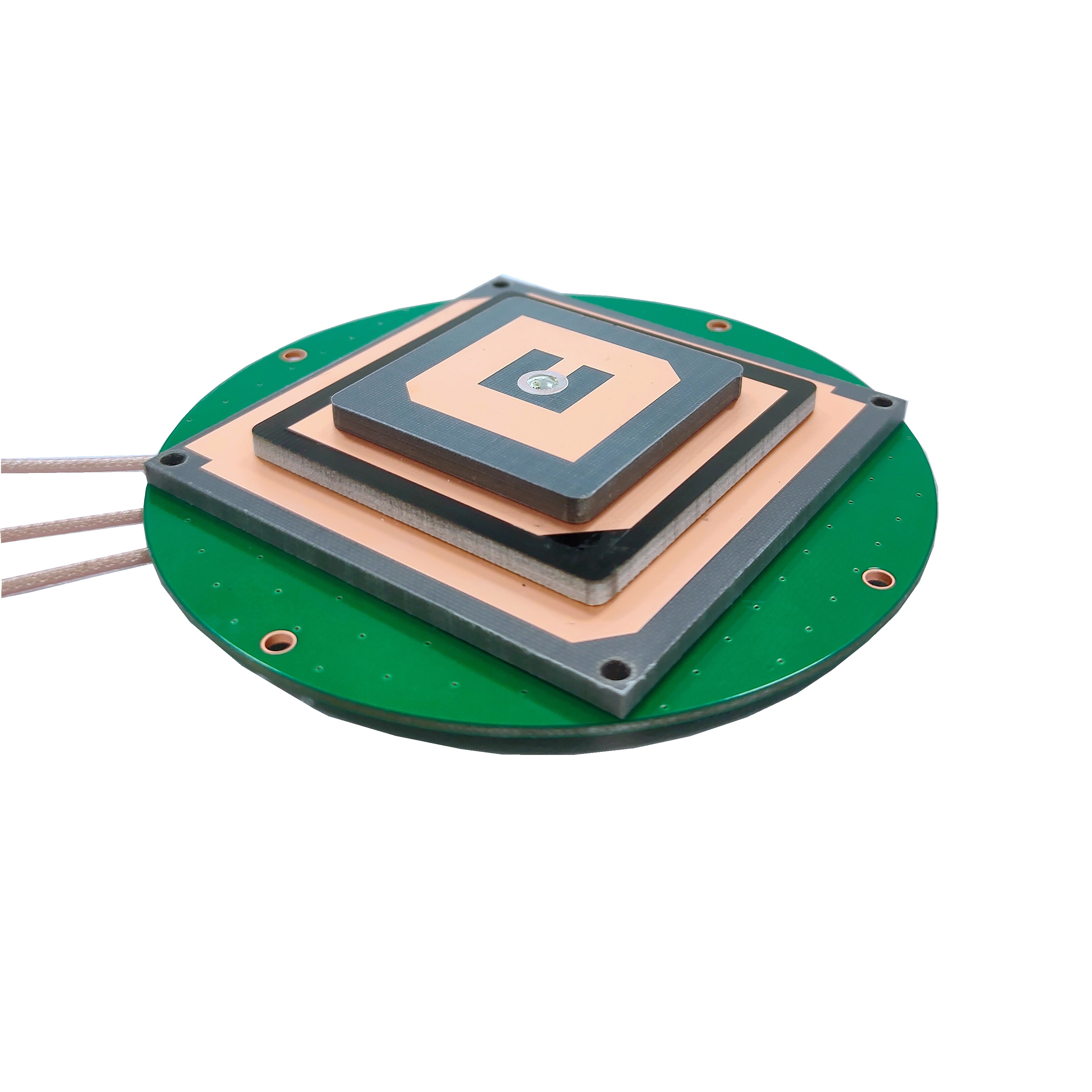
A compact RTK GNSS embedded module is a complete, self-contained GNSS receiver system packaged into a small surface-mount device (SMD) or a compact board-level product. It integrates a high-performance multi-band GNSS receiver, an advanced RTK engine, memory, and support for various communication protocols onto a single chip or printed circuit board (PCB). These modules are designed not as end-user products but as core components to be embedded into larger systems and devices, empowering them with centimeter-accurate positioning capabilities.
The core value proposition of these modules is the democratization of high-precision GNSS. By condensing complex RF and digital signal processing (DSP) hardware and advanced algorithms into an affordable, easy-to-integrate form factor, they have opened the floodgates for innovation across countless industries. They are the "engine" or the "brain" of high-precision positioning, handling all the heavy lifting of satellite signal acquisition, tracking, and the complex calculations required for RTK, providing a simple, clean, and precise position data stream to the host device.
The key terms defining this technology are:
Compact: Typically measuring from a few square centimeters up to a small matchbox size. This small footprint is crucial for integration into drones, robotics, agricultural sensors, and consumer devices where space is at a premium.
RTK (Real-Time Kinematic): This is the core technology that enables the leap from meter-level to centimeter-level accuracy. It involves using a fixed base station that broadcasts corrections for the errors affecting GNSS signals to a mobile rover (the module). The rover uses these corrections to achieve ultra-precise positioning in real-time.
GNSS (Global Navigation Satellite System): Refers to the constellation of satellites, including GPS (USA), GLONASS (Russia), Galileo (EU), and BeiDou (China). High-end modules are multi-band, meaning they can receive signals on multiple frequencies (e.g., L1, L2, L5) from multiple constellations simultaneously. This drastically improves performance, reliability, and convergence time.
Embedded Module: This signifies its role as a component within a larger electronic system. It is designed for engineers and product developers, featuring standard electrical interfaces (UART, SPI, I2C, USB, CAN), making it relatively straightforward to integrate into a custom PCB design.
The applications for these modules are vast and growing exponentially. They are the key enabling technology for precision agriculture, guiding autonomous tractors and enabling variable rate application of seeds and fertilizers. They are essential for the navigation and control of Unmanned Aerial Vehicles (UAVs) for mapping, surveying, and delivery. They provide the precise location for autonomous mobile robots in warehouses and for last-mile delivery robots on city sidewalks. Furthermore, they are finding use in emerging consumer applications like advanced driver-assistance systems (ADAS), vehicle-to-everything (V2X) communication, and even high-precision personal navigation devices for augmented reality.
In summary, the compact RTK GNSS module represents a paradigm shift. It has transformed high-precision positioning from a specialized, cumbersome, and expensive tool into a commodity-level technology that can be baked into the fabric of virtually any mobile device, unleashing a new wave of automation and location intelligence.
The design of a compact RTK GNSS module is a marvel of modern electronics, representing a deep integration of RF engineering, high-speed digital processing, and sophisticated software. Every cubic millimeter is optimized for performance, power efficiency, and robustness.
Core Architectural Components:
RF Front-End (RFFE): This is the "gateway" for satellite signals. It is a highly sensitive analog section responsible for:
Receiving: Capturing extremely weak L-band signals (around 1.2-1.6 GHz) through an external antenna.
Filtering: Using surface acoustic wave (SAW) filters or integrated passive device (IPD) filters to block out-of-band interference from cellular, WiFi, and other RF sources that could overwhelm the system.
Amplifying: Employing a Low-Noise Amplifier (LNA) to boost the faint signals while adding minimal electronic noise. The quality of the LNA is critical for the module's ability to work in challenging signal environments.
Down-converting: Translating the high-frequency RF signals to a lower, intermediate frequency (IF) that is easier for the digital processor to handle.
Digitizing: Using an Analog-to-Digital Converter (ADC) to convert the analog IF signal into a digital bitstream for processing by the digital baseband processor.
GNSS Baseband Processor: This is the digital heart of the module. It is typically an application-specific integrated circuit (ASIC) or a highly optimized digital signal processor (DSP) core. Its tasks are computationally intensive:
Correlation: It runs hundreds or thousands of parallel correlators to search for and lock onto the pseudo-random noise (PRN) codes broadcast by each satellite. This is like trying to find and sync up with dozens of specific, faint whispers in a crowded, noisy room.
Tracking: Once locked, it continuously tracks the phase of the satellite's carrier wave and the timing of its code, making fine adjustments to account for the Doppler shift caused by the relative motion between the satellite and the receiver.
Navigation Solution: It calculates the preliminary ("single-point") position, velocity, and time (PVT) based on the code-phase measurements from the satellites it has locked onto.
RTK Engine / CPU: This is the "brain" that performs the high-precision magic. It can be a separate microprocessor core within the same ASIC or a deeply integrated hardware accelerator. Its sole purpose is to execute the complex RTK algorithm:
It takes the raw observation data (carrier-phase and code-phase measurements) from the baseband processor.
It receives correction data (typically in RTCM or CMR format) from a base station via a communication link (e.g., 4G/5G, WiFi, radio modem).
It uses this data to resolve the integer ambiguities—the fundamental challenge of RTK. This process determines the exact number of whole carrier wavelengths between the satellite and the receiver, which is the key to centimeter accuracy.
It outputs the final, refined, centimeter-accurate position solution.
Memory: The module contains different types of memory:
Flash Memory: Stores the device's firmware, which includes the algorithms for signal processing, navigation, and the RTK engine. It also stores configuration settings.
SRAM: Provides volatile working memory for the processors to perform calculations.
EEPROM: May be used for storing non-volatile user settings.
Peripherals and Interfaces: A critical aspect of an embedded module is its ability to communicate with the host system. Standard interfaces include:
UART (Universal Asynchronous Receiver/Transmitter): The most common interface for sending NMEA data (position, velocity, time) and receiving configuration commands.
USB: For high-bandwidth data transfer and power.
SPI/I2C: For connecting to other sensors (e.g., IMUs) within the embedded system, enabling sensor fusion.
CAN Bus: Particularly important in automotive and agricultural vehicle applications.
GPIOs: General-purpose input/output pins for triggering events or reading statuses.
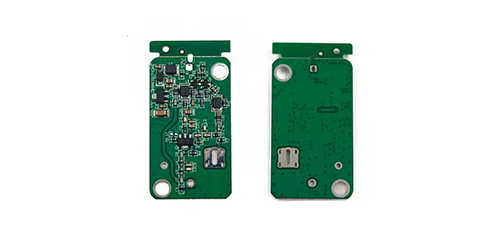
Physical Construction:
The components are mounted on a multi-layer PCB. The stack-up is carefully designed to manage impedance for high-frequency RF traces and to provide solid ground planes for shielding and noise reduction. The entire assembly is often protected by a metal shield can. This can serves two purposes: it prevents electromagnetic interference (EMI) from the module from affecting other nearby components, and it protects the sensitive RF front-end from external EMI. For the most rugged applications, the module may be conformally coated to protect against moisture, dust, and corrosion.
The design is a constant trade-off between performance, size, power consumption, and cost. Achieving this level of integration and performance in a compact form factor is one of the most significant achievements in modern positioning technology.
The operation of a compact RTK module is a two-stage process: first, it acts as a standard GNSS receiver to calculate a rough position, and then it engages its RTK engine to refine that position to centimeter-level precision. Understanding this requires delving into the sources of GNSS error and the ingenious method RTK uses to eliminate them.
Stage 1: Standard GNSS Positioning and Error Sources
A standard GNSS receiver calculates its position by measuring the time it takes for a signal to travel from a satellite to itself. Multiplying this time by the speed of light gives a "pseudorange." Errors in this measurement are inevitable and include:
Satellite Clock Error: Although satellites have atomic clocks, tiny timing errors translate to large distance errors.
Orbital Error (Ephemeris Error): The satellite's reported position in space is not perfectly accurate.
Ionospheric Delay: The Earth's ionosphere slows down the GNSS signals, altering their speed and path.
Tropospheric Delay: The lower atmosphere also causes a delay, dependent on temperature, pressure, and humidity.
Receiver Noise: Imperfections in the receiver's hardware introduce small measurement errors.
These errors cause standard GNSS to have an accuracy of several meters.
Stage 2: The Real-Time Kinematic (RTK) Correction
RTK works by using a base station, a GNSS receiver set up on a known, precisely surveyed location. Because the base station knows its exact position, it can calculate the exact error in the pseudorange measurements it receives from each satellite.
The Process:
Base Station Operation: The base station receives GNSS signals, computes its own position based on them, and compares this calculated position to its known, exact position. The difference is the total error. It then formats this error information into standardized correction messages (most commonly using the RTCM - Radio Technical Commission for Maritime Services protocol) and broadcasts them.
Rover Reception (The Module's Role): The compact RTK module, acting as the rover, does two things simultaneously:
It receives the raw GNSS signals from the satellites overhead.
It receives the correction data stream from the base station via a secondary communication link (e.g., a cellular modem built into the host device).
Applying Corrections to Code-Phase: The rover can apply these corrections directly to its pseudorange measurements. This can improve accuracy to the sub-meter level, a technique known as Differential GNSS (DGPS). However, RTK goes much further by using the carrier phase.
The Power of Carrier Phase: The underlying carrier wave of the GNSS signal has a much shorter wavelength (~19 cm for GPS L1) than the PRN code (~300 meters). Measuring the phase of this carrier wave is extremely precise. The problem is that the receiver can only measure the fractional part of the wavelength; it doesn't know the integer number of full wavelengths between the satellite and itself—this is the integer ambiguity.
Integer Ambiguity Resolution (IAR): This is the core, computationally intensive task of the RTK engine. The module uses the correction data from the base station and a complex set of statistical algorithms (e.g., LAMBDA method) to resolve this integer ambiguity. Once the integer number is known for several satellites, the module can use the ultra-precise carrier-phase measurements to calculate its position relative to the base station with centimeter accuracy.
Output: The module's output is typically a robust position solution, often accompanied by a key metric: the Fixed solution. When the integer ambiguities are successfully resolved, the module outputs a "Fixed" solution, indicating centimeter-level accuracy. If the conditions are poor (e.g., not enough satellites, loss of correction link), it may fall back to a "Float" solution (meter-level accuracy) or a standard GNSS solution.
The Role of Multi-Band Reception: Modern compact RTK modules are almost always multi-band (e.g., receiving L1 and L5 signals). This is crucial for RTK. Using signals on two different frequencies allows the module to directly calculate and remove the ionospheric delay, which is the largest source of error. This dramatically speeds up the integer ambiguity resolution process (called "time-to-fix") and makes it more reliable, especially over longer baselines (distances between rover and base station).
In essence, the working principle is one of relative positioning. The module doesn't absolutely calculate its position on Earth; it calculates its precise vector relative to the base station, and since the base station's position is known with extreme precision, so is the rover's.
The adoption of compact RTK GNSS modules brings immense benefits but also introduces specific technical and logistical challenges that system integrators must navigate.
Advantages:
Unprecedented Accuracy and Precision: The primary advantage is the ability to achieve centimeter-level positioning in real-time. This is a quantum leap from standard GNSS and enables applications that were previously impossible.
High Level of Integration: Modules encapsulate immense complexity into a simple, easy-to-use component. They handle all the intricacies of multi-constellation, multi-frequency GNSS reception and complex RTK algorithms, presenting a simple data interface to the host system. This drastically reduces development time and cost.
Small Form Factor: Their compact size is revolutionary. It allows high-precision positioning to be embedded into small devices like drones, robotics, and wearable technology, enabling new product categories and use cases.
Power Efficiency: Despite their computational power, modern modules are designed for low power consumption, making them suitable for battery-operated field devices and Internet of Things (IoT) applications.
Cost-Effectiveness: The mass production of these modules has driven down the cost of high-precision technology from tens of thousands of dollars to a few hundred dollars, making it accessible to a much wider market.
Reliability and Consistency: As commercial off-the-shelf (COTS) components from reputable manufacturers, they undergo rigorous testing and quality control, offering a level of reliability that is difficult to achieve with a custom-designed solution.
Challenges and Considerations:
Dependence on Correction Data: The module's high accuracy is entirely dependent on a continuous, low-latency stream of RTCM correction data. Any interruption in this link—due to cellular network dropout, radio interference, or base station failure—causes the rover to revert to a less accurate mode (Float or standalone). System design must include robust communication links and fallback strategies.
Base Station Infrastructure Requirement: RTK requires a base station. This can be a private base station set up by the user (which requires a surveyed point and adds operational complexity) or a subscription to a public/private Network RTK (NRTK) service (e.g., via cellular networks), which adds a recurring cost and may not be available in all regions.
Complex System Integration: While the module itself is integrated, integrating it into a final product is non-trivial. It requires significant engineering expertise in:
RF Design: Designing the antenna interface and PCB layout to preserve signal integrity is critical. A poor antenna or bad layout will cripple performance.
Power Management: Ensuring clean, stable power supplies to avoid noise that can desensitize the RF front-end.
Communication Links: Integrating the cellular or radio modem for corrections and managing the data flow.
Firmware Development: Writing software to configure the module, parse its output, and handle its data correctly.
Integer Ambiguity Resolution Time: The "time-to-fix" — the time it takes to resolve the integers and achieve a Fixed solution — can vary from seconds to minutes. It depends on the number of satellites, observed signal quality, ionospheric conditions, and the distance to the base station. Applications requiring instant-on, centimeter-level accuracy must manage user expectations around this initial convergence period.
Environmental Sensitivity: While better than standard GPS, RTK performance can still be degraded by severe multipath (signals reflecting off buildings, the ground, or the host device itself) and obstructions like heavy foliage or urban canyons. This often necessitates sensor fusion with inertial measurement units (IMUs) for continuous positioning during GNSS outages.
Cost: While cheaper than legacy systems, a full RTK system (module, high-quality antenna, cellular subscription) is still significantly more expensive than a standard GNSS solution, impacting the bill of materials for the end product.
The compact RTK module is a key enabling technology, driving automation and efficiency across a diverse range of sectors.
Applications:
Precision Agriculture: The largest application domain. Used for auto-guidance of tractors and harvesters, yield monitoring, variable rate application (VRA) of inputs, and field mapping. This reduces overlap, saves fuel and chemicals, and increases yields.
Unmanned Aerial Vehicles (UAVs / Drones): Essential for drone-based photogrammetry and LiDAR mapping. The module provides the precise geotagging for each captured image, allowing for the creation of highly accurate 2D orthomosaics and 3D models. Also used for navigation in precision drone spraying and delivery.
Robotics: Autonomous Mobile Robots (AMRs) in warehouses and factories use RTK for precise navigation and picking. Last-Mile Delivery Robots on sidewalks and Agricultural Robots for weeding and harvesting rely on it for outdoor path planning.
Construction and Earthmoving: Machine Control (MC) systems on bulldozers, graders, and excavators use RTK to guide blades and buckets to the exact design grade, eliminating stakes and reducing rework.
Advanced Driver-Assistance Systems (ADAS) and Autonomous Vehicles: While full autonomy requires a sensor suite, RTK provides a highly accurate and absolute positioning reference, crucial for lane-level accuracy, vehicle localization for mapping (HD maps), and V2X applications.
Surveying and Mapping: Although traditional surveyors use high-end receivers, compact RTK modules have created new classes of equipment like handheld mapping devices and simple rovers for GIS data collection.
Marine and Aquatic Applications: Precision docking, dredging, and autonomous surface vessel (ASV) navigation.
Future Trends:
Tighter IMU Integration (Deep Sensor Fusion): The future is not just a GNSS module but a Positioning Engine that tightly couples RTK with a built-in inertial measurement unit (IMU). Advanced Kalman filters will fuse these data sources to provide continuous, smooth, and reliable positioning even during complete GNSS outages (e.g., in tunnels, under bridges).
Cloud-Based RTK and PPP-RTK: The correction infrastructure will shift towards cloud-centric models. Precise Point Positioning (PPP) techniques, which use precise orbital and clock correction data, are being merged with the concept of wide-area RTK networks to create PPP-RTK. This promises to deliver centimeter accuracy over continental distances without the need for a local base station, reducing dependency on cellular coverage for corrections.
Enhanced Robustness and Cybersecurity: Modules will incorporate advanced Anti-Jamming and Anti-Spoofing capabilities at the hardware and firmware level. As systems become more autonomous, protecting them from intentional interference or malicious fake GNSS signals becomes a critical safety requirement.
AI and Machine Learning: AI will be used to improve integer ambiguity resolution in challenging environments, predict and filter multipath errors, and autonomously detect and mitigate signal anomalies.
Automatic Dead Reckoning (ADR): For automotive applications, modules will deeply integrate with vehicle sensors (wheel odometry, steering angle) to provide seamless positioning in urban canyons and parking garages without requiring expensive tactical-grade IMUs.
Further Miniaturization and Reduced Power: The trend towards smaller, more power-efficient chips will continue, enabling their integration into smaller IoT devices and wearables, further expanding the market.
Conclusion
The compact RTK GNSS embedded module is a transformative technology that has fundamentally altered the landscape of high-precision positioning. By condensing the immense complexity of multi-frequency GNSS reception and advanced RTK algorithms into an affordable, power-efficient, and easy-to-integrate package, it has broken down the barriers to entry for centimeter-level accuracy.
It has evolved from a specialized tool for surveyors into a core enabling technology for the Fourth Industrial Revolution, underpinning the automation of agriculture, construction, logistics, and transportation. It is the technological foundation upon which autonomous systems build their understanding of the world, providing the precise and absolute location data that is essential for safe and efficient operation.
While challenges remain—primarily the dependency on correction data and the complexities of system integration—the ongoing trends point towards a future of even greater integration, intelligence, and robustness. The convergence of RTK with inertial navigation, cloud corrections, and artificial intelligence will further solidify the role of these modules as the indispensable "positioning engine" for an increasingly spatially aware and automated world. They are not just components; they are the key that unlocks a new tier of operational efficiency, safety, and capability across the global economy.

 86 0755 2819 9597
86 0755 2819 9597
Lucy Yang | lucy.y@toxutech.com
Nicole Li | nicole@toxutech.com
Dotty Zhao | sales04@toxutech.com
Global Business Director / Sales Team / Global Operations










 En
En Cn
Cn Korean
Korean Home >
Home > 


