

-
Products -PCBA Manufacturing RF Connectors RF Cable Assemblys Embedded Antennas External Antennas Positioning Chips and Modules
RF Connectors

RF Cable Assemblys
Embedded Antennas
External Antennas
Positioning Chips and Modules































 Language
Language


Language


The Global Navigation Satellite System (GNSS) has revolutionized how we determine position, velocity, and time (PVT) across countless applications. From the navigation system in a smartphone to the autopilot on a commercial airliner, GNSS provides a fundamental utility for the modern world. However, standard, single-receiver GNSS has a critical limitation: its accuracy is typically in the range of 2 to 5 meters under open sky conditions. This level of precision is sufficient for guiding a person to a general address but is utterly inadequate for tasks requiring centimeter-level accuracy, such as guiding an agricultural tractor between crop rows, autonomously landing a drone on a charging pad, or conducting precise land surveys.
This is where Real-Time Kinematic (RTK) GNSS technology emerges as a game-changer. RTK is a powerful technique that enhances the precision of GNSS positioning from the meter-level down to the centimeter-level in real-time. An RTK GNSS Embedded Module is the physical embodiment of this technology—a compact, integrated electronic component that encapsulates the necessary hardware (radio frequency front-end, processor, memory) and software (algorithms, firmware) to perform high-precision positioning. It is designed not as a standalone consumer device but as a core engine to be embedded into larger systems and products, providing them with a superhuman sense of location.
At its core, RTK relies on a simple but profound concept: correcting the errors inherent in GNSS signals. The signals traveling from satellites orbiting 20,000 km above the Earth to a receiver on the ground are subject to a variety of atmospheric delays (ionospheric and tropospheric), satellite clock errors, and orbital inaccuracies. A standard GNSS receiver must model these errors, leading to the several-meter uncertainty. RTK bypasses this modeling by using a differential method.
The system requires two receivers: a stationary base station and a mobile rover. The base station is set up over a known, precisely surveyed point. Because its position is exactly known, the base station can calculate the exact error in the satellite signals it receives. It then broadcasts these error corrections (or more precisely, the raw carrier-phase measurements) to the rover unit via a radio link, cellular network, or internet connection. The rover, which incorporates the RTK GNSS module, uses these corrections to cancel out the identical errors from its own satellite signal measurements, dramatically improving its calculated position. The key to centimeter accuracy is the resolution of the integer ambiguity in the carrier-phase measurements of the signal, a complex mathematical process that the module's processor performs in real-time.
The evolution of the RTK module from a bulky, expensive, specialized piece of survey equipment to a compact, affordable, and mass-producible embedded system is a story of technological convergence. Advances in semiconductor manufacturing have allowed for the creation of highly integrated System-on-a-Chip (SoC) designs that combine multi-frequency, multi-constellation GNSS receivers with powerful application processors. Simultaneously, the proliferation of wireless communication options (4G/5G, LoRa, Wi-Fi) has made receiving correction data more accessible than ever. Furthermore, the expansion of satellite constellations beyond the American GPS—including Russia's GLONASS, the European Union's Galileo, and China's BeiDou—provides more satellites in view, improving reliability and convergence times, especially in challenging urban environments.
Today, RTK GNSS modules are the silent, precise brains behind a silent revolution in automation and data precision. They are the enabling technology that allows machines to see their environment with unparalleled geographic clarity. They are no longer confined to the realm of professional surveyors; they are being deployed by the thousands in agriculture, construction, robotics, and transportation, driving efficiency, safety, and autonomy to levels previously unimaginable. This overview sets the stage for a deeper dive into the design, principles, and vast applications of these remarkable technological marvels.
The transformation of the RTK concept into a physical, functioning module is a feat of modern electrical engineering and systems integration. The design of an RTK GNSS embedded module is a careful balancing act between performance, power consumption, physical size, thermal management, and cost. Unlike a consumer-grade GNSS chip found in a phone, an RTK module is a sophisticated device built for robustness and extreme precision.
Core Architectural Components:
Antenna Input and RF Front-End: The journey of a satellite signal begins here. The module typically has a dedicated input for an external active antenna (though some may integrate a small antenna). The RF front-end is a critical subsystem comprising:
Bandpass Filters: To select the desired GNSS frequency bands (e.g., L1, L2, L5, E1, E5a, E5b, B1, B2) and reject out-of-band interference.
Low-Noise Amplifier (LNA): To amplify the extremely weak signals from space (often below -130 dBm) without adding significant noise, which is crucial for maintaining the signal-to-noise ratio (SNR).
Downconverter: To translate the high-frequency satellite signals (e.g., ~1.5 GHz) to a lower, intermediate frequency (IF) that is easier for the digital processor to handle.
Analog-to-Digital Converter (ADC): To digitize the analog IF signal, preparing it for digital signal processing.
GNSS System-on-a-Chip (SoC): This is the heart of the module. A modern RTK-capable SoC is a marvel of integration, containing:
Multi-Frequency, Multi-Constellation Correlators: These are hardware engines that run thousands of correlators in parallel to acquire and track the signals from all visible satellites across multiple frequencies (GPS L1/L2/L5, Galileo E1/E5a/E5b/E6, GLONASS L1/L2/L3, BeiDou B1/B2/B3) simultaneously. Multi-frequency capability is essential for RTK as it allows for faster and more reliable resolution of the integer ambiguity and better mitigation of ionospheric delay.
High-Performance CPU Core(s): A powerful ARM Cortex-A or R-class processor runs the module's firmware and the intensely complex real-time kinematic algorithms. These algorithms perform the heavy mathematical lifting of calculating positions, processing correction data, and, most importantly, resolving the integer ambiguities on the carrier-phase measurements.
Memory: Integrated Flash memory stores the firmware and boot code, while RAM is used for the real-time processing of data and algorithms.
Peripheral Interfaces and Connectivity: A module must communicate with the outside world. Standard interfaces include:
UART (Serial): The classic interface for sending NMEA sentences (e.g., GNGGA, GNRMC) containing position, time, and status data to a host microcontroller or computer.
USB: For higher-bandwidth data transfer and power.
SPI / I2C: For connecting to other sensors, a common theme in Sensor Fusion (see below).
CAN Bus: Particularly important in automotive and agricultural vehicle applications where CAN is the standard networking protocol.
GPIO: General-purpose input/output pins for triggering events or reading statuses.
Correction Data Interface: This is a defining feature of an RTK module. It requires a secondary communication channel to receive the correction stream from the base station. This is often integrated into the module or facilitated by the host system. Common interfaces for this include:
UART: For receiving corrections from a separate radio modem.
Integrated Cellular Modem (LTE Cat-M1, NB-IoT): A growing trend is to embed a cellular modem directly on the module's PCB, allowing it to connect to NTRIP (Networked Transport of RTCM via Internet Protocol) casters over the internet to receive corrections from a nearby base station or a subscription-based correction service (e.g., Trimble RTX, Hexagon SmartNet).
Integrated Radio Modem: Some modules may integrate a LoRa, UHF, or 900 MHz radio modem for receiving corrections directly from a private base station.
Physical Construction and Design Considerations:
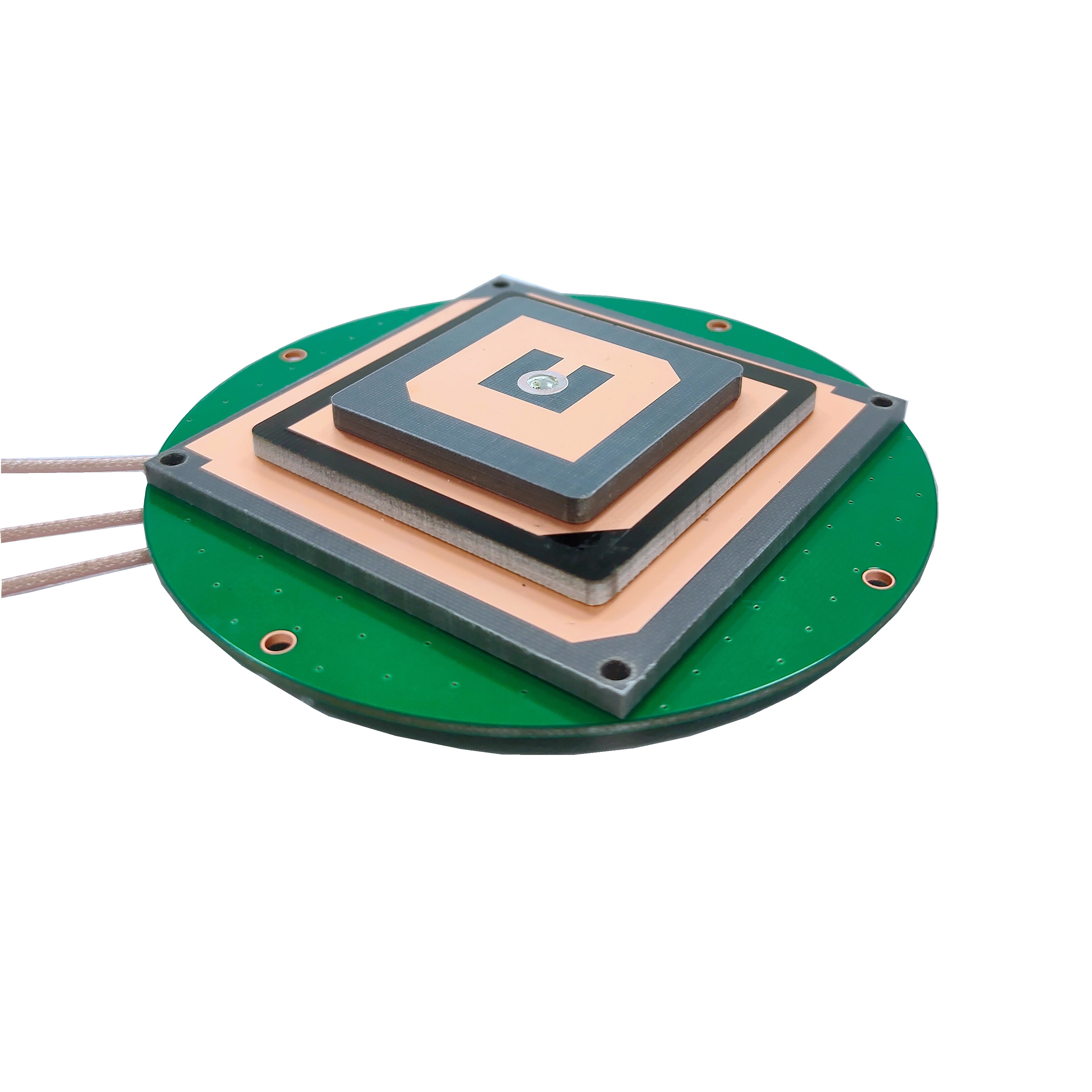
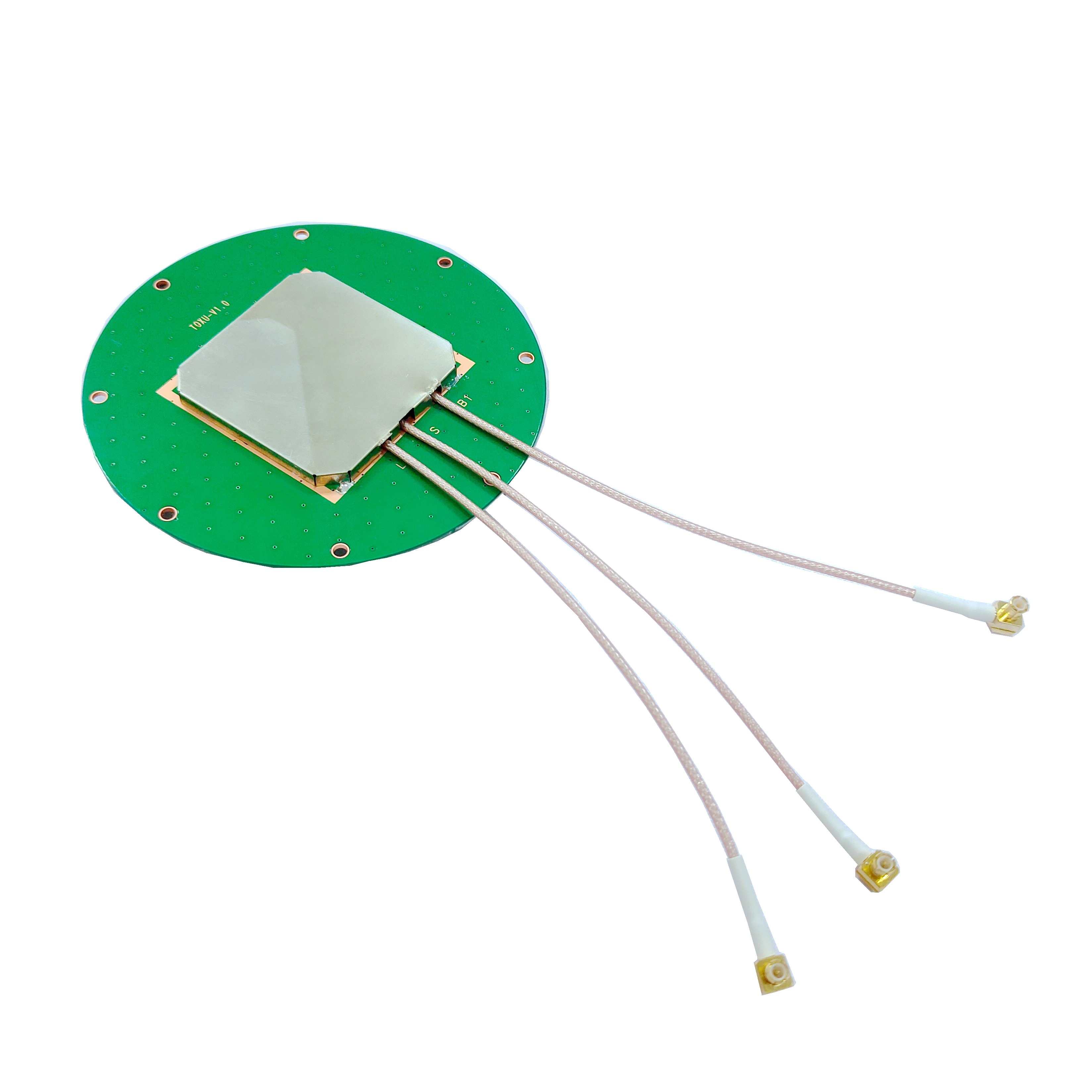
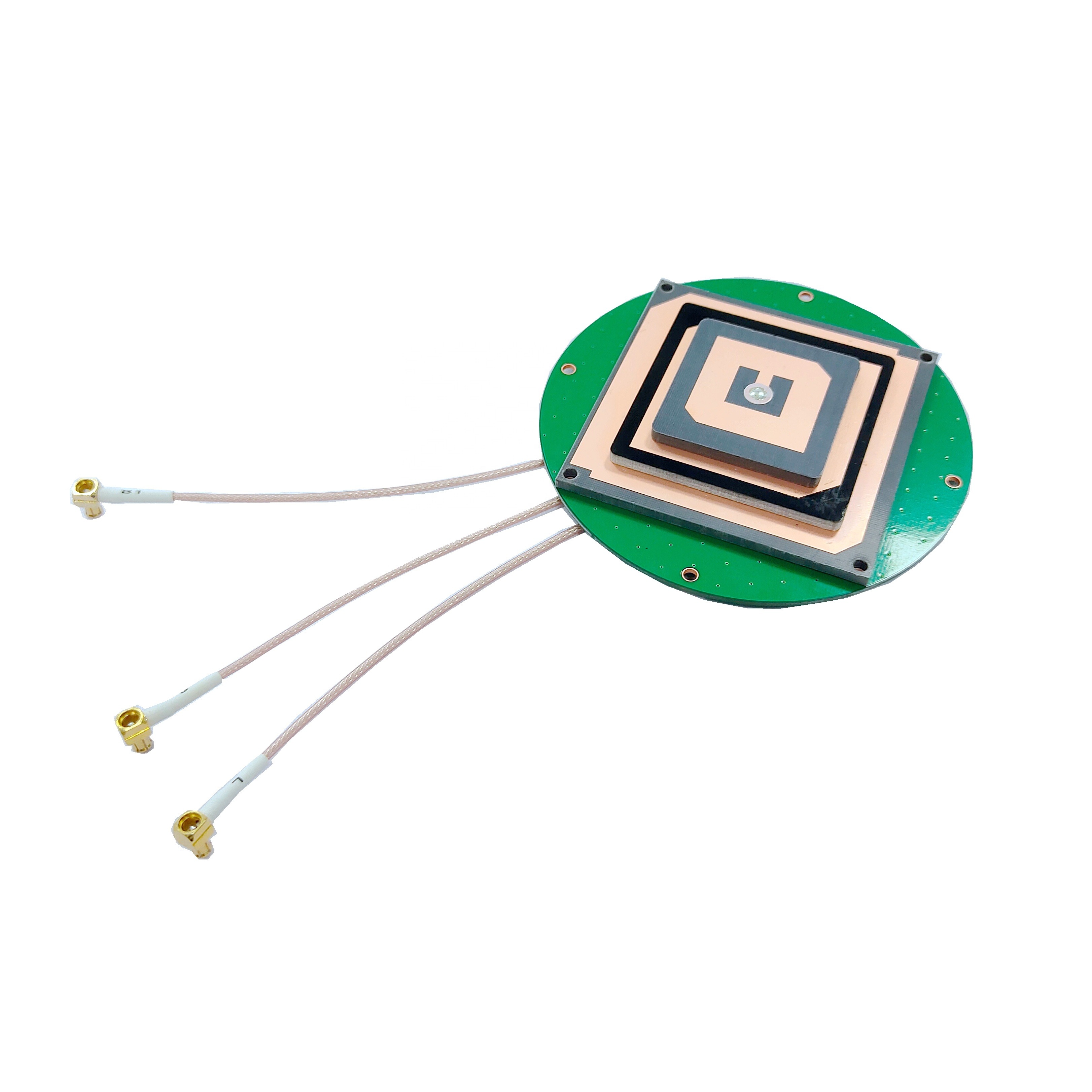
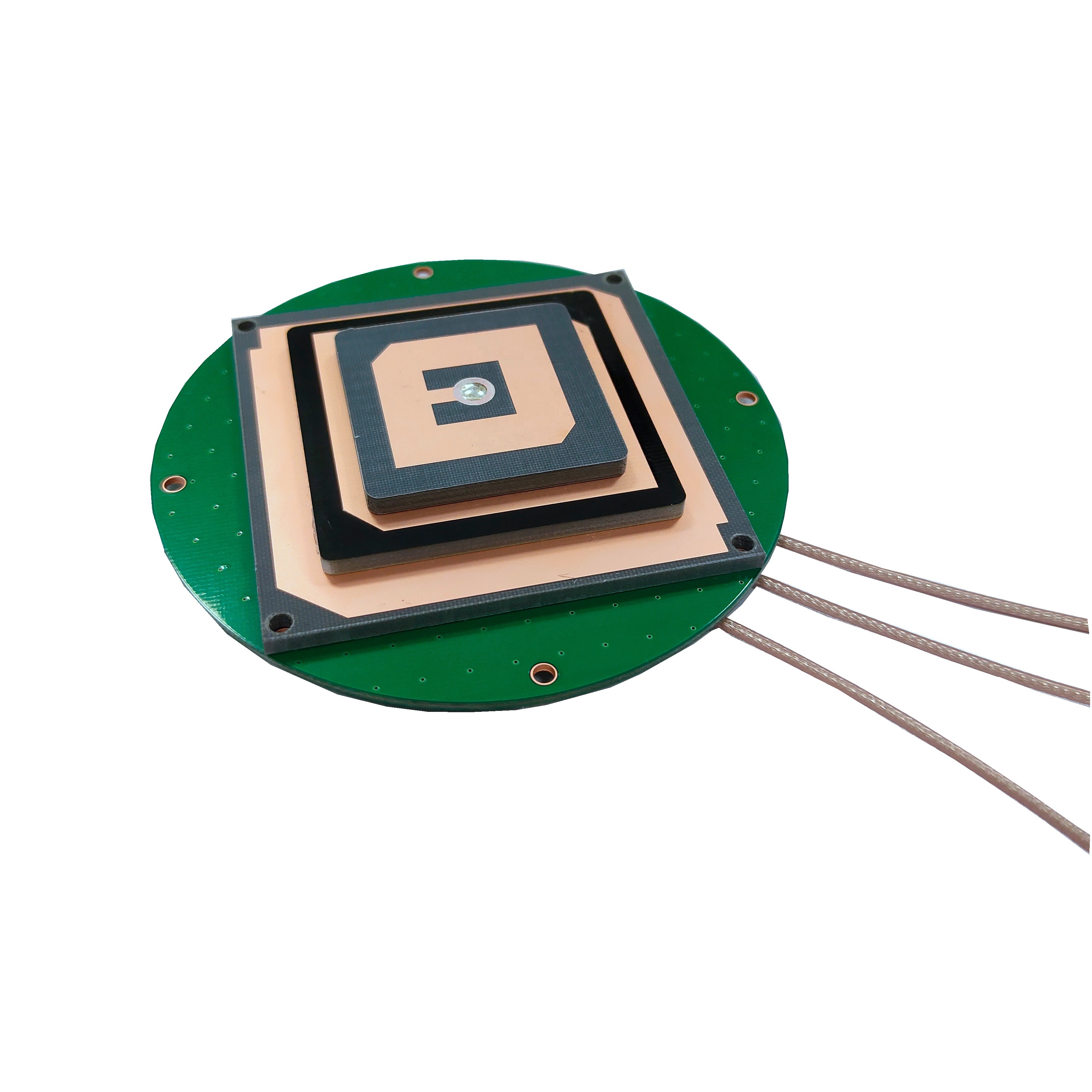
An RTK module is typically a multi-layer Printed Circuit Board (PCB) populated with surface-mount technology (SMT) components. It is often housed in a ruggedized metal shield can to protect sensitive circuitry from Electromagnetic Interference (EMI) and to aid thermal dissipation.
Thermal Management: The high-performance SoC and RF components generate heat. Poor thermal design can lead to frequency drift in oscillators and computational errors, killing accuracy. Careful PCB layout, thermal vias, and the use of the shield can as a heat sink are critical.
Power Regulation: Clean, stable power is non-negotiable for precision electronics. The module includes sophisticated power management circuitry to provide noise-free voltage rails to the SoC, RF section, and oscillators from a common input source (e.g., 3.3V or 5V).
Timing and Oscillators: The importance of a stable clock cannot be overstated. While many modules use a standard Temperature Compensated Crystal Oscillator (TCXO), higher-end modules may feature an Oven-Controlled Crystal Oscillator (OCXO) or support for an external, high-precision oscillator to minimize clock jitter, which directly impacts timing and ranging accuracy.
Sensor Fusion Ready: Modern modules are increasingly designed to be the centerpiece of a multi-sensor navigation system. They are built to easily interface with Inertial Measurement Units (IMUs containing accelerometers and gyroscopes), magnetometers, and wheel odometry sensors. This allows the system to provide continuous, smooth positioning even during short GNSS outages (e.g., under a bridge or in a tunnel) by dead reckoning.
In summary, the design of an RTK GNSS module is a holistic exercise in precision engineering, where every component, from the antenna port to the last GPIO pin, is optimized to deliver one thing: unwavering, centimeter-accurate position data in real-time.
To understand how an RTK GNSS module achieves centimeter-level accuracy, one must move beyond the simple concept of trilateration used in standard GNSS and delve into the intricacies of carrier-phase measurement and differential correction. The process is a complex dance of signal processing, communication, and advanced mathematics, all performed in real-time.
1. The Foundation: Carrier-Phase Measurement vs. Code-Phase
A standard GNSS receiver determines its position by measuring the time it takes for a coded signal (the C/A code) to travel from the satellite to the receiver. This is known as code-phase positioning. The wavelength of this C/A code is long (about 300 meters for GPS L1), meaning that even a small timing error results in a large positioning error (meters).
RTK, however, uses the carrier wave itself—the underlying, high-frequency sine wave that the codes are modulated upon. The wavelength of this carrier is much shorter (19 cm for GPS L1). If the receiver can measure the phase of this carrier wave with respect to a reference generated internally, it can determine the range to the satellite with millimeter-level precision. However, there's a catch: the receiver can only measure the fractional part of the wavelength. The integer number of full wavelengths between the satellite and receiver—the integer ambiguity—is unknown at the start. The single most important task of the RTK engine is to resolve this integer ambiguity correctly and quickly.
2. The Differential Setup: Base and Rover
The RTK process requires two receivers:
Base Station: Placed on a known, fixed, and precisely surveyed point.
Rover: The mobile unit whose position we want to determine with high accuracy. The RTK module is the core of the rover.
3. The Step-by-Step RTK Process:
Step 1: Satellite Signal Tracking. Both the base and the rover independently track the signals from the same set of satellites. They demodulate the navigation data and, crucially, record the carrier-phase measurements for each satellite on each frequency.
Step 2: Correction Data Generation. The base station, knowing its exact position, calculates what the true carrier-phase measurement should be for each satellite. It compares this true value to the measurement it actually observes. The difference is the error, caused by atmospheric delays, satellite clock error, etc. The base station packages these raw measurements or the computed errors into a standardized format (typically RTCM - Radio Technical Commission for Maritime Services) and broadcasts them.
Step 3: Correction Data Reception. The rover's RTK module receives this correction data stream via its communication link (radio, cellular).
Step 4: Error Cancellation (Differential Positioning). The rover applies the corrections from the base to its own set of carrier-phase measurements. Because the two receivers are relatively close (typically < 20 km), the atmospheric errors affecting the signals are highly correlated. Applying the base's corrections effectively cancels these common errors from the rover's measurements.
Step 5: Integer Ambiguity Resolution (IAR). This is the computational core of RTK. With the errors largely removed, the rover's task is to find the one true integer number of wavelengths for each satellite-receiver pair that makes all the geometric calculations consistent. This is a complex statistical process involving searching through possible integer combinations and validating the solution using multiple frequencies (which have different wavelengths, creating a geometry that makes the correct solution obvious). Using dual or triple frequencies drastically speeds up this process and makes it more reliable. Techniques like LAMBDA (Least-squares AMBiguity Decorrelation Adjustment) are commonly used algorithms for this.
Step 6: Fixed Solution Calculation. Once the integer ambiguities are correctly resolved, the rover has precise, millimeter-accurate ranges to the satellites. Using these corrected ranges, it performs a final least-squares or Kalman filter calculation to determine its position relative to the base station, resulting in centimeter-level accuracy. This is known as a "fixed" solution.
Step 7: Output. The module outputs its highly precise position, typically in a standard NMEA message format, along with critical metadata like the number of satellites used, the age of the corrections, and most importantly, the solution type ("RTK Fixed" vs. "RTK Float" vs. "Single").
Float vs. Fixed Solution:
If the integer ambiguity cannot be resolved with high confidence (due to obstructions, low satellite count, or multipath), the module falls back to a "float" solution. Here, the integers are estimated as real numbers (floats). This is still more accurate than standard GNSS (decimeter-level) but not the coveted centimeter-level of a fixed solution. The module's performance is often measured by its time-to-first-fix (TTFF) and its ability to maintain a fixed solution in challenging environments.
In essence, the working principle of an RTK module is a sophisticated exercise in comparative measurement and statistical problem-solving, transforming noisy, meter-level global signals into a local, rock-solid, centimeter-accurate truth.
The adoption of RTK GNSS modules brings transformative benefits but also introduces specific technical and operational challenges that system designers must navigate.
Advantages:
Unparalleled Accuracy: The foremost advantage is centimeter-level horizontal and vertical accuracy in real-time. This enables applications that are simply impossible with standard GNSS, from autonomous machine guidance to precise scientific measurement.
Real-Time Operation: Unlike post-processing techniques, RTK provides this high accuracy instantaneously. This is critical for closed-loop control systems where a machine must react to its position now, such as a drone maintaining its hover or a tractor steering itself.
Improved Reliability and Integrity: The RTK process provides inherent data validation. The module constantly outputs a solution type (Fixed, Float, Single). This self-diagnostic capability allows the host system to know the quality of the position fix and take appropriate action (e.g., an autonomous car could safely slow down if its RTK fix is lost).
Multi-Constellation and Multi-Frequency Resilience: Modern RTK modules leverage all available satellites from GPS, GLONASS, Galileo, and BeiDou. This significantly improves availability and reliability, especially in "urban canyon" environments where satellite signals are frequently blocked by buildings. Multi-frequency signals enable faster integer resolution and better mitigation of ionospheric errors.
Enabler of Automation: RTK is the cornerstone of most outdoor autonomous and semi-autonomous systems. It provides the absolute positioning reference that other sensors (LiDAR, cameras, radar) are often calibrated against.
Challenges and Limitations:
Dependency on Correction Data: An RTK rover is blind without a continuous, low-latency stream of correction data from a base station. Any interruption in this link—due to radio range limitations, cellular dead zones, or internet downtime—immediately degrades the rover's accuracy to float or single-point levels.
The "Baseline" Limitation: The accuracy of RTK degrades as the distance (baseline) between the rover and the base station increases. This is primarily because the atmospheric errors (ionospheric and tropospheric delays) become less correlated over longer distances. While reliable centimeter accuracy is possible up to 20-30 km, performance becomes less predictable and requires more advanced modeling beyond 50 km.
Integer Ambiguity Resolution Challenges: Achieving and maintaining a fixed solution is not always instantaneous or guaranteed. Factors that can delay or break a fix include:
Signal Obstruction: Trees, buildings, and terrain can block signals.
Multipath: Signals reflecting off surfaces like glass buildings or water can corrupt the precise carrier-phase measurement.
Ionospheric Activity: During periods of high solar activity, the ionosphere can become turbulent and less predictable, challenging the error-cancellation assumption.
Cost and Complexity: While prices have fallen dramatically, an RTK system is still more expensive and complex than a standard GNSS solution. It requires either setting up and maintaining a private base station or subscribing to a correction service. The rover system itself requires the RTK module, a high-quality antenna, and a communication link.
Power Consumption: The computational load of running RTK algorithms and the power required for the communication link (especially cellular) are higher than for a standard GNSS receiver. This can be a critical factor for battery-operated devices like drones or handheld survey equipment.
Initialization Time (Time-to-First-Fix - TTFF): After a cold start, the module needs time to download satellite ephemeris data, acquire signals, and then resolve the integer ambiguities. This can take from several seconds to a few minutes, a period during which high accuracy is not available. This is often mitigated by using systems like OSR (OmniSTAR) or PPP (Precise Point Positioning) to get a better initial position estimate.
Understanding these advantages and challenges is crucial for successfully implementing an RTK-based system. The technology is powerful but operates within specific constraints that must be designed around.
The democratization of centimeter-accurate positioning through affordable, embedded RTK modules is fueling innovation across a vast spectrum of industries. The applications are diverse, each leveraging the precision of RTK to solve unique problems.
Current Applications:
Precision Agriculture: This is one of the largest markets. RTK guides tractors for auto-steering, enabling sub-inch pass-to-pass accuracy. This eliminates overlaps and gaps in planting, fertilizing, and spraying, saving inputs, fuel, and time, while increasing yields. It also enables variable rate application (VRA) and yield mapping.
Unmanned Aerial Vehicles (UAVs / Drones): RTK is critical for drone applications requiring precise positioning. This includes:
Surveying & Mapping: Drones with RTK can generate highly accurate orthomosaics and 3D models without the need for numerous ground control points (GCPs), drastically reducing fieldwork time.
Infrastructure Inspection: Precise positioning allows for repeatable flights to monitor changes over time on assets like bridges, wind turbines, and power lines.
Precision Spraying: Agricultural drones use RTK to target specific areas within a field.
Delivery and Logistics: For automated takeoff, landing, and navigation.
Robotics and Autonomous Systems:
Autonomous Mobile Robots (AMRs): For outdoor logistics in ports, warehouses, and manufacturing campuses.
Last-Mile Delivery Robots: To navigate sidewalks and roads accurately.
Agricultural Robots: For weeding, harvesting, and scouting.
Construction and Earthmoving: Machine Control (MC) systems use RTK to guide bulldozers, graders, and excavators. The blade or bucket of the machine is positioned automatically to the exact design grade, improving efficiency, reducing material waste, and eliminating rework.
Transportation and Automotive: While full autonomy requires a sensor fusion approach, RTK provides a highly reliable absolute position for Advanced Driver-Assistance Systems (ADAS), vehicle testing, and the development of autonomous shuttles and trucks. It's also used in tolling systems and fleet management for precise location logging.
Surveying and Geomatics: The traditional application. RTK has revolutionized land surveying, making real-time, centimeter-accurate measurements possible without the need for static post-processing, dramatically increasing productivity.
Marine and Hydrography: For precision dredging, port construction, and bathymetric surveys (mapping the seafloor).
Future Trends:
Mass Market Adoption via Correction Services: The rise of affordable, subscription-based correction services (delivered over cellular networks) is removing the barrier of owning a private base station. Companies like SwiftNav, Point One Navigation, and Trimble are creating "correction networks" that allow any RTK module with a cellular connection to get a fix almost anywhere.
Tightly Coupled Sensor Fusion: The future is not just RTK, but RTK++.
RTK + IMU: Deep integration with Inertial Measurement Units is becoming standard. The IMU provides high-frequency, short-term stability and continuity during GNSS outages, while RTK provides the long-term absolute accuracy and corrects the IMU's drift. This is essential for automotive and urban robotics.
RTK + LiDAR/Camera/SLAM: Fusion with perception sensors allows systems to build a precise map of their environment and localize within it, combining absolute positioning with relative obstacle avoidance.
Advancements in PPP-RTK: This emerging technology combines the wide-area coverage of Precise Point Positioning (PPP) with the fast integer ambiguity resolution of RTK. It uses a sparse network of reference stations to generate atmospheric correction models that are broadcast to users over a large area (even continent-scale). This could eventually provide global centimeter-level accuracy without the need for a local base station, a true holy grail for global autonomy.
Enhanced Robustness and Security: Future modules will focus on hardening against jamming and spoofing (malicious interference) through advanced signal processing techniques and the use of encrypted signals from Galileo and GPS. AI and machine learning will be used to better filter multipath and improve performance in challenging signal environments.
Further Miniaturization and Power Reduction: The trend towards smaller, lower-power, and less expensive modules will continue, opening up new applications in consumer electronics, wearables, and Internet of Things (IoT) devices where precise timing and location are valuable.
The trajectory is clear: RTK GNSS technology is moving from a specialized tool to a ubiquitous sensor, becoming an indispensable component of the autonomous and data-driven future.
Conclusion
The development and proliferation of the RTK GNSS embedded module represent a pivotal advancement in positioning technology. It has successfully transitioned a capability once reserved for well-funded scientific and surveying projects into an accessible, commercially viable component that is now a key enabler of modern automation and precision across countless industries.
By mastering the complex art of carrier-phase ambiguity resolution and leveraging the power of differential correction, these compact modules perform a remarkable feat: they filter out the noise of the atmosphere and satellite errors to extract a crystal-clear, centimeter-accurate truth from signals that have traveled over 20,000 kilometers. This transformation from meter-level ambiguity to centimeter-level certainty is what empowers a tractor to steer itself, a drone to map a construction site, and a robot to navigate a public sidewalk.
However, as we have explored, this power does not come without its constraints. The dependency on continuous correction data, the challenges of maintaining a fixed solution in difficult environments, and the inherent limitations of baseline distance are important factors that system integrators must carefully manage. The technology is not a magic bullet but a powerful tool that works best when its operating principles are understood and respected.
Looking forward, the role of the RTK module is evolving from a standalone positioning source to the fundamental anchor in a sophisticated sensor fusion ecosystem. Its integration with inertial sensors, computer vision, and LiDAR is creating robust navigation systems that are greater than the sum of their parts, capable of providing continuous, reliable, and safe operation even when satellite signals are temporarily unavailable.
The ongoing trends of PPP-RTK, widespread correction networks, and increasing satellite constellations promise a future where high-precision positioning is available globally, reliably, and affordably. This will unlock new waves of innovation in autonomy, logistics, and data collection that we are only beginning to imagine.
In conclusion, the RTK GNSS embedded module is far more than just a component; it is a foundational technology that is quietly but profoundly reshaping our relationship with the physical world, providing machines with a precise sense of place and paving the way for a more efficient, automated, and data-aware future.

 86 0755 2819 9597
86 0755 2819 9597
Lucy Yang | lucy.y@toxutech.com
Nicole Li | nicole@toxutech.com
Dotty Zhao | sales04@toxutech.com
Global Business Director / Sales Team / Global Operations










 En
En Cn
Cn Korean
Korean Home >
Home > 


