

-
Products -PCBA Manufacturing RF Connectors RF Cable Assemblys Embedded Antennas External Antennas Positioning Chips and Modules
RF Connectors

RF Cable Assemblys
Embedded Antennas
External Antennas
Positioning Chips and Modules































 Language
Language


Language


In an era where the Internet of Things (IoT) and mobile devices are proliferating, the demand for precise positioning technology has skyrocketed. Real - Time Kinematic (RTK) Global Navigation Satellite System (GNSS) embedded modules have been crucial in providing high - accuracy positioning, enabling applications ranging from surveying and autonomous driving to asset tracking. However, traditional RTK GNSS embedded modules often consume significant amounts of power, which limits their use in battery - powered devices and long - term monitoring applications. This has led to the development of RTK GNSS embedded modules with low power consumption, which aim to strike a balance between high - precision positioning and energy efficiency.
GNSS, which encompasses multiple satellite constellations such as GPS (United States), GLONASS (Russia), Galileo (Europe), and BeiDou (China), provides the fundamental framework for global positioning. However, the standard positioning accuracy offered by GNSS, which is typically in the range of several meters, often falls short for many high - precision applications. This is where RTK technology steps in. RTK is a differential GNSS technique that significantly enhances the positioning accuracy by using data from reference stations. These reference stations, located at known positions, continuously monitor the GNSS signals and calculate the differences between the actual satellite positions and the positions indicated by the received signals. This correction data is then transmitted to the rover (the device equipped with the RTK GNSS module), which uses it to adjust its own positioning calculations, thereby achieving much higher accuracy.
The “embedded” nature of these modules means they are designed to be integrated directly into other devices or systems. This integration can occur in a variety of products, including smartphones, tablets, drones, surveying equipment, and automotive control units. The compact and lightweight design of embedded RTK GNSS modules allows for seamless incorporation into the host device's architecture, enabling the device to leverage high - precision positioning capabilities without significant increases in size or complexity.
High - precision RTK GNSS embedded modules have found extensive use in a multitude of applications. In surveying and mapping, they enable the creation of highly detailed and accurate maps, which are crucial for construction projects, land management, and urban planning. In the automotive industry, especially with the rapid development of autonomous driving, these modules are essential for precise vehicle positioning, enabling features such as lane - keeping, collision avoidance, and accurate navigation on complex road networks. In the realm of smart cities, they contribute to intelligent transportation systems, asset tracking, and environmental monitoring. As the Internet of Things (IoT) continues to expand, the demand for high - precision RTK GNSS embedded modules is expected to surge, driving further innovation and development in this field.
The design and construction of a low - power RTK GNSS embedded module involve a careful and comprehensive approach to balance power efficiency, performance, and size. Every component and design choice is optimized to reduce power consumption without compromising the module's ability to provide accurate positioning.
Antenna Design
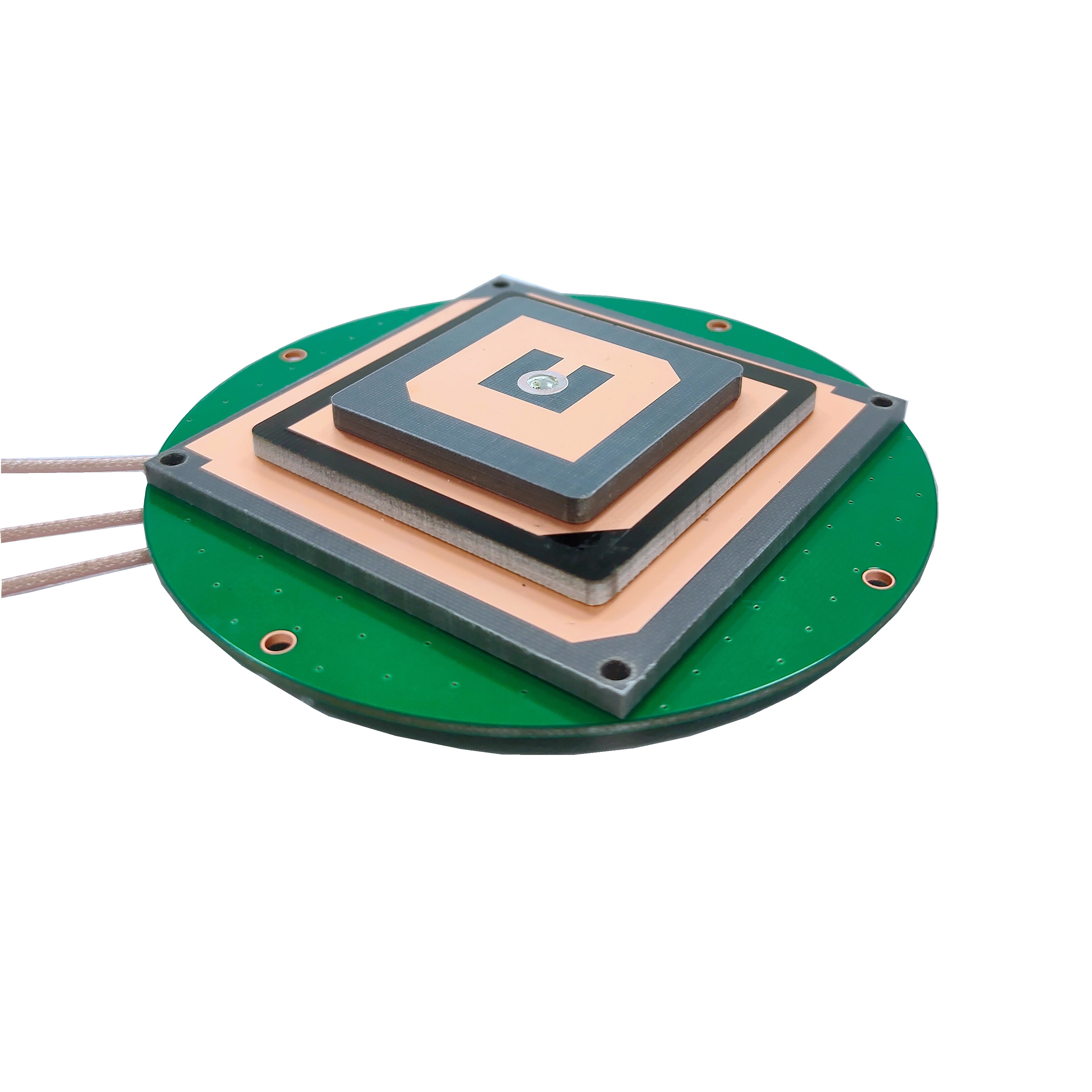
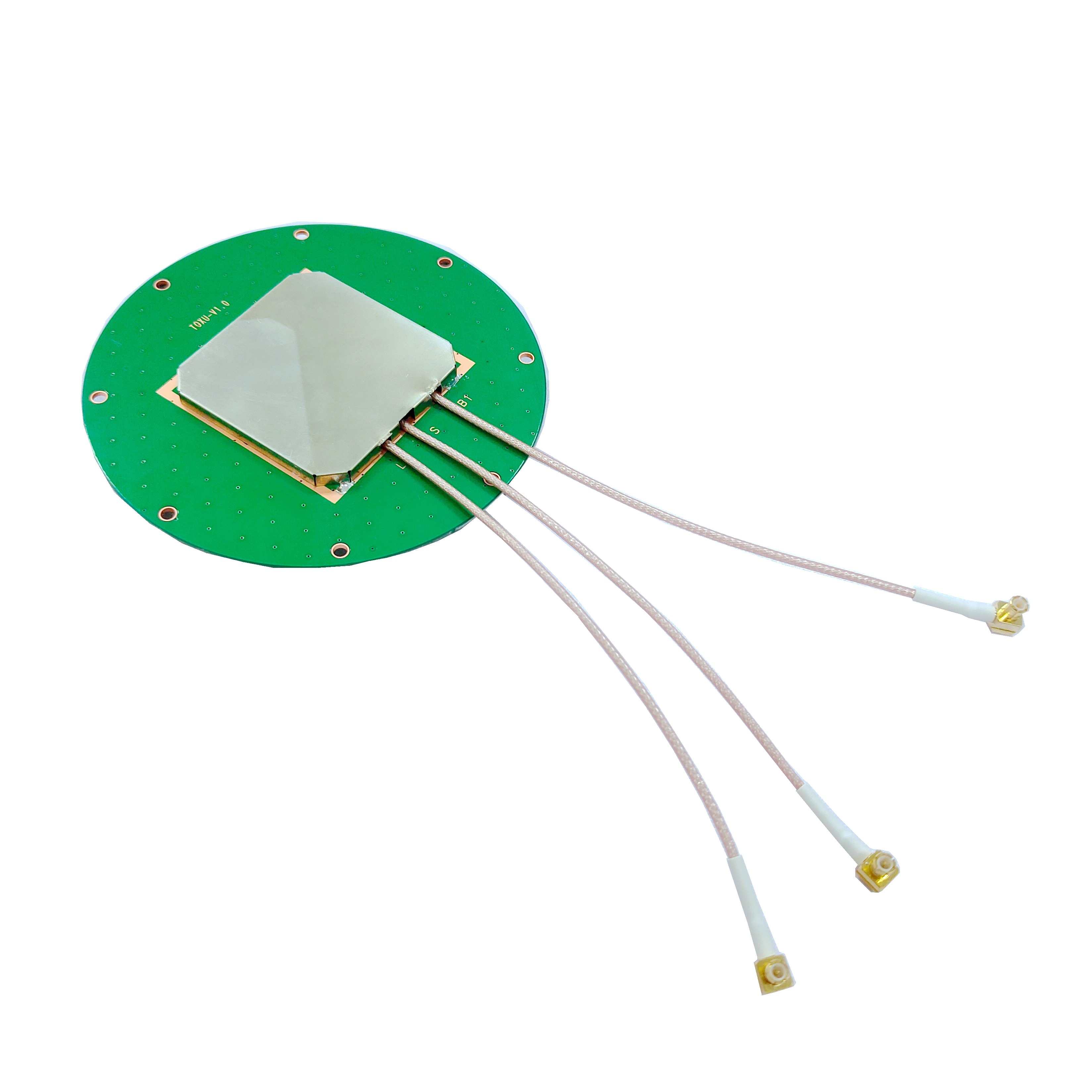
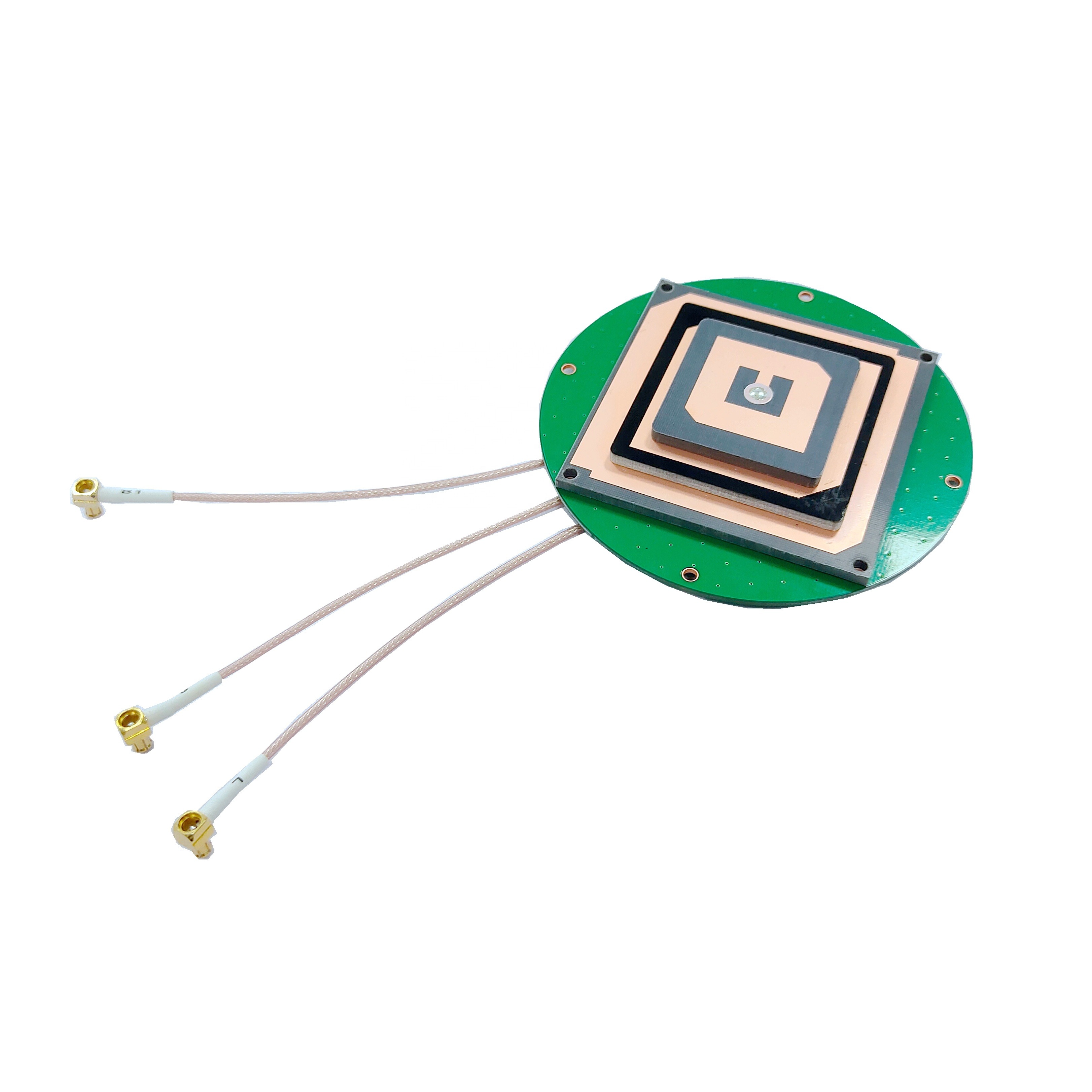
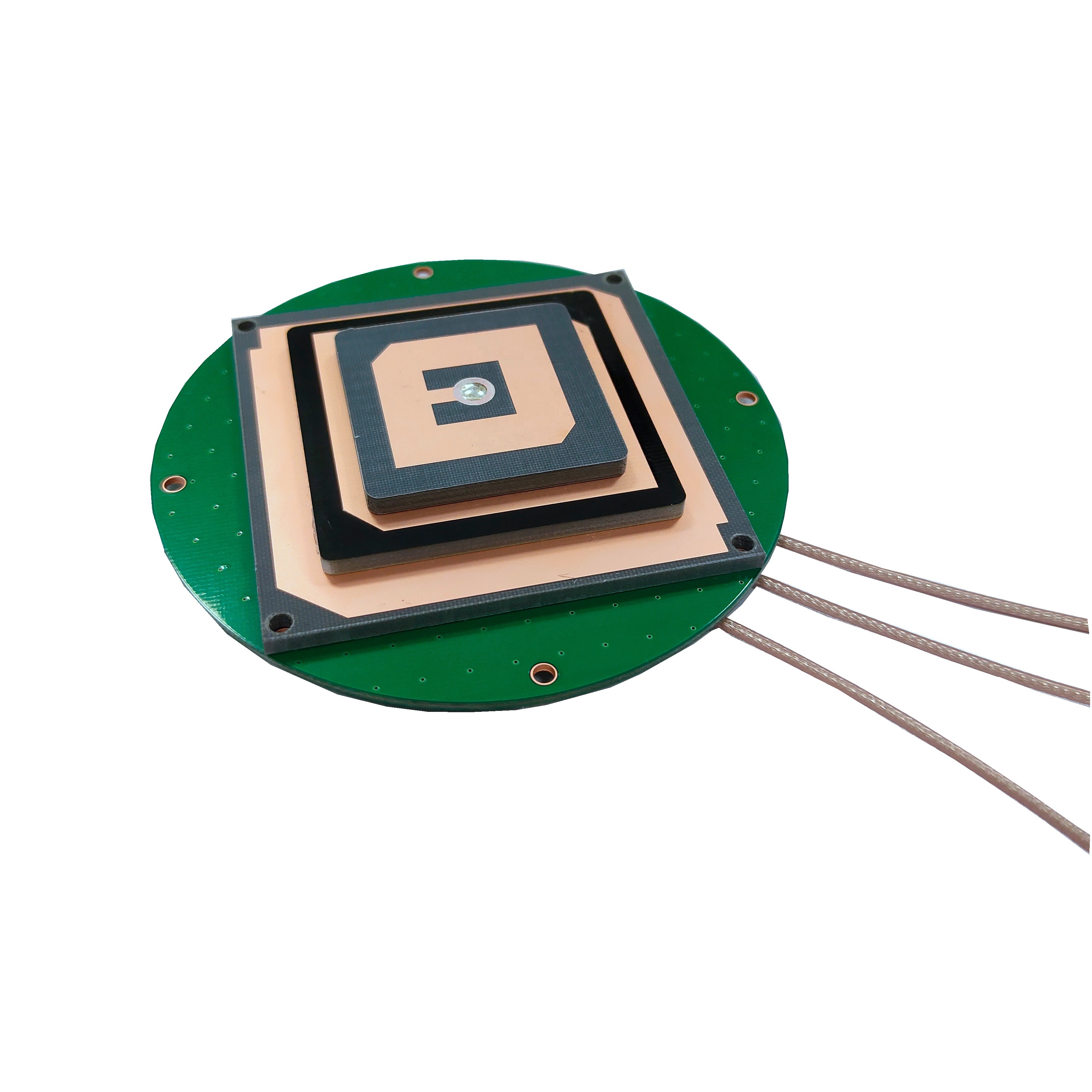
The antenna is the starting point for signal reception in an RTK GNSS embedded module. For low - power modules, the focus is on selecting antennas that are not only efficient in capturing weak satellite signals but also consume minimal power. Microstrip antennas are commonly used due to their compact size and relatively low power requirements for operation. These antennas consist of a metallic patch on a dielectric substrate with a ground plane beneath.
To further reduce power consumption, designers may choose antennas with high gain and selectivity. High - gain antennas can capture signals more effectively, reducing the need for excessive amplification, which in turn saves power. Selective antennas are designed to focus on the specific frequency bands used by GNSS satellites, filtering out unwanted signals and minimizing the power wasted on processing irrelevant frequencies. Additionally, advancements in materials science have led to the development of dielectric substrates with lower loss tangents, reducing energy dissipation in the antenna structure.
The integration of multi - band and multi - constellation capabilities in the antenna design also plays a role in power optimization. By being able to receive signals from multiple GNSS constellations and frequency bands, the module can adapt to different signal conditions. In areas with weak signals from one constellation, it can switch to another, ensuring continuous operation without having to increase power output to boost signal strength from a single source.
Signal Processing Unit
The signal processing unit is a power - intensive part of the RTK GNSS embedded module, but significant efforts are made to reduce its power consumption. Modern low - power signal processing units often use advanced semiconductor technologies, such as low - voltage complementary metal - oxide - semiconductor (CMOS) processes. These processes allow for the creation of circuits that operate at lower voltages, reducing power consumption while maintaining performance.
The choice of components within the signal processing unit is also critical. Low - noise amplifiers (LNAs) with high power - added efficiency (PAE) are selected. PAE measures how effectively an amplifier converts input power into amplified output power while minimizing power dissipated as heat. High - PAE LNAs can amplify the weak GNSS signals with less power consumption. Similarly, analog - to - digital converters (ADCs) with low power consumption are integrated. These ADCs are designed to digitize the analog GNSS signals accurately while using minimal energy.
Digital signal processors (DSPs) or field - programmable gate arrays (FPGAs) in the signal processing unit are programmed with optimized algorithms. These algorithms are designed to perform signal acquisition, tracking, and demodulation with reduced computational complexity. For example, advanced signal acquisition algorithms can quickly detect and lock onto satellite signals, minimizing the time the module spends in a high - power search mode.
RTK Engine
The RTK engine, responsible for implementing the Real - Time Kinematic algorithm, is another area where power reduction strategies are applied. The Kalman filter, a common algorithm used in RTK engines for position estimation, can be optimized for lower power consumption. Simplified versions of the Kalman filter or alternative estimation algorithms that require less computational resources are explored. These algorithms balance accuracy and power consumption, ensuring that the module can still achieve high - precision positioning while using less power.
In addition, the way the RTK engine receives and processes correction data from reference stations is optimized. Instead of continuously receiving and processing all available correction data, intelligent data filtering techniques are employed. The engine can analyze the relevance of the correction data based on the module's current position and signal conditions, only processing the necessary data and reducing unnecessary power consumption.
Power Management Unit
A dedicated power management unit (PMU) is a key component of a low - power RTK GNSS embedded module. The PMU monitors and controls the power supply to different components of the module. It can adjust the voltage and current supplied to each component based on its operating requirements. For example, when the module is in a standby mode or during periods of low activity, the PMU can reduce the power supply to non - essential components or put them into a sleep mode.
The PMU also implements power - saving strategies such as dynamic voltage and frequency scaling (DVFS). DVFS adjusts the voltage and clock frequency of the processor based on the current workload. When the module is performing less computationally intensive tasks, such as when the signal conditions are stable and only minor position updates are required, the PMU can lower the voltage and frequency, reducing power consumption.
Enclosure and Packaging
The enclosure and packaging of the low - power RTK GNSS embedded module are designed not only for protection but also with power considerations in mind. Materials with good thermal conductivity are often chosen for the enclosure to facilitate heat dissipation. Efficient heat dissipation ensures that the internal components operate within their optimal temperature range, reducing the need for additional cooling mechanisms that consume power.
The packaging design also aims to minimize electromagnetic interference (EMI). By reducing EMI, the module can operate more efficiently, as interference can cause signal degradation and increase the power required for proper signal processing. Shielding techniques are used in the packaging to block external electromagnetic fields, and the layout of components within the module is optimized to reduce internal EMI sources.
The working principles of a low - power RTK GNSS embedded module are similar to those of a standard RTK GNSS module but with power - saving mechanisms integrated at every stage of operation. The module operates in a coordinated manner with GNSS satellites, reference stations, and the host device to provide accurate positioning while conserving power.
Signal Reception and Initial Processing
The process begins with the antenna capturing the weak radio - frequency signals transmitted by GNSS satellites. These signals carry information about the satellite's position and time. The antenna, designed for efficiency, converts the electromagnetic energy of the signals into electrical signals with minimal power loss.
The weak electrical signals are then fed into the low - power signal processing unit. The low - noise amplifier (LNA) in the unit amplifies the signals with high power - added efficiency, boosting the signal strength while consuming as little power as possible. The amplified signals are mixed with a local oscillator signal generated by the frequency synthesizer to convert them to an intermediate frequency (IF), a step that simplifies further processing.
The IF signals are digitized by a low - power analog - to - digital converter (ADC). The digitized signals are then processed by a digital signal processor (DSP) or a field - programmable gate array (FPGAs) using optimized algorithms. These algorithms perform signal acquisition, which involves quickly identifying and locking onto the satellite signals. Once acquired, the signals are tracked continuously, and the navigation data, including satellite position, time, and orbital parameters, is extracted.
RTK Correction Data Reception and Integration
While the module processes the raw GNSS signals, it also needs to receive correction data from reference stations. These stations, located at known positions, monitor the GNSS signals and calculate the differences between the actual satellite positions and the positions indicated by the received signals. The correction data, which includes information about satellite clock errors, orbital errors, and atmospheric delays, is transmitted to the module via communication channels such as radio, cellular networks, or the Internet.
The low - power RTK engine in the module receives this correction data and employs intelligent processing strategies. Instead of processing all incoming data continuously, it filters and prioritizes the data based on the module's current needs. For example, if the module's position has not changed significantly since the last update, it may only process essential correction data, reducing power consumption associated with unnecessary data processing.
Position Calculation
The RTK engine uses an optimized algorithm, such as a simplified Kalman filter, to calculate the precise position of the module. The algorithm takes into account the previous position estimates, the current GNSS measurements (after applying the corrections), and the uncertainty associated with each measurement. By continuously updating the position estimate based on the incoming data, the engine provides a high - precision position solution.
During the position calculation process, the power management unit monitors the workload of the RTK engine and other components. If the calculation requires less computational power, the PMU adjusts the power supply to the relevant components, reducing their power consumption. Once the position is calculated, the module transmits the high - precision position information to the host device via its communication interfaces, ensuring that the host device can utilize the data while the module continues to operate with minimal power usage.
Advantages
One of the most significant advantages of low - power RTK GNSS embedded modules is their extended operational life in battery - powered devices. By consuming less power, these modules allow devices to operate for longer periods without the need for recharging or battery replacement. This is especially beneficial for remote sensors deployed in hard - to - reach areas, wearable devices that users expect to function throughout the day, and autonomous vehicles that need to conserve power for their primary operations.
The low power consumption also enables large - scale deployments at a lower cost. In applications where numerous devices need to be equipped with RTK GNSS modules, such as in a smart city infrastructure with thousands of connected sensors or a logistics fleet with hundreds of tracked vehicles, the reduced power usage means lower energy costs and less frequent battery replacements. This not only cuts down on operational expenses but also reduces the environmental impact associated with battery disposal.
Another advantage is the enhanced compatibility with a wide range of devices. Traditional high - power RTK GNSS modules may be restricted in their use due to power limitations of the host device. Low - power modules, on the other hand, can be integrated into smaller, more power - constrained devices, expanding the scope of applications for high - precision positioning technology. They can be used in everything from small - form - factor IoT sensors to lightweight drones, enabling new use cases and applications that were previously not feasible.
Challenges
Despite their advantages, low - power RTK GNSS embedded modules face several challenges. One of the primary challenges is achieving a balance between power consumption and positioning accuracy. Aggressive power - saving measures may lead to a degradation in the accuracy of the positioning solution. For example, simplifying algorithms in the RTK engine to reduce power consumption might result in less precise position calculations. Developing techniques to optimize power usage without sacrificing accuracy remains an ongoing research area.
Another challenge is related to the communication requirements of RTK systems. Continuously receiving correction data from reference stations, especially over wireless communication channels, consumes a significant amount of power. Finding ways to reduce the power associated with data reception, such as optimizing communication protocols or using more energy - efficient communication modules, is a complex task. Additionally, in areas with limited or unreliable communication infrastructure, ensuring that the module can still operate effectively while conserving power becomes even more difficult.
The integration of low - power components and power - saving techniques also adds complexity to the design and manufacturing process. Each component and design choice needs to be carefully evaluated for its impact on power consumption, performance, and cost. This requires a high level of expertise in multiple fields, including electronics engineering, software development, and materials science. Moreover, testing and validating the performance of low - power RTK GNSS embedded modules in real - world scenarios can be challenging, as it requires accurate measurement of power consumption and positioning accuracy under various operating conditions.
Applications
Low - power RTK GNSS embedded modules have a wide array of applications across different industries. In the IoT sector, they are used in environmental monitoring. For instance, remote weather stations, soil moisture sensors, and air quality monitors can be equipped with these modules. The low power consumption allows these sensors to operate for long periods in the field, transmitting accurate location - tagged data for environmental research and management.
In the transportation and logistics industry, they play a crucial role in asset tracking. Delivery trucks, shipping containers, and even individual packages can be fitted with low - power RTK GNSS modules. This enables real - time tracking of assets, optimizing routes, reducing delivery times, and improving overall supply chain efficiency. For last - mile delivery drones, the low power consumption ensures that the drones can complete their missions without running out of power, providing a reliable and efficient delivery solution.
In the field of wildlife tracking, low - power RTK GNSS modules are attached to animals to monitor their movements. The extended battery life of the modules allows for long - term tracking, providing valuable insights into animal behavior, migration patterns, and habitat use. This information is essential for conservation efforts and wildlife management.
Future Trends
The future of low - power RTK GNSS embedded modules is promising, with several trends likely to shape their development. One trend is the further miniaturization of components. As technology advances, smaller and more power - efficient integrated circuits, antennas, and other components will be developed. This will not only reduce the physical size of the modules but also enable their integration into even smaller and more power - constrained devices.
The integration of artificial intelligence (AI) and machine learning (ML) algorithms is another emerging trend. AI and ML can be used to optimize the power consumption of the modules in real - time. These algorithms can analyze the operating conditions, such as signal strength, movement patterns of the host device, and available correction data, and adjust the power - saving strategies accordingly. For example, if the device is stationary, the module can enter a deeper sleep mode, further reducing power consumption.
The development of new communication technologies will also impact low - power RTK GNSS modules. Technologies like 5G and Low - Power Wide - Area Networks (LPWANs) offer the potential for faster and more energy - efficient data transmission. Integrating these technologies into the modules can reduce the power consumed during data reception from reference stations, improving the overall efficiency of the RTK system.
There is also a growing trend towards the development of self - powering RTK GNSS modules. Research is underway to explore energy - harvesting techniques, such as solar, thermal, or kinetic energy harvesting, to power these modules. If successful, self - powering modules would eliminate the need for battery replacements, further extending the operational life of devices and reducing environmental impact.
Conclusion
In conclusion, RTK GNSS embedded modules with low power consumption are a significant advancement in positioning technology. They address the critical need for high - precision positioning in power - constrained devices and applications, enabling extended operational life, cost - effective large - scale deployments, and expanded compatibility.
However, challenges such as balancing power consumption and accuracy, managing communication - related power usage, and dealing with the complexity of design and testing remain. Overcoming these challenges requires continuous research and innovation in multiple areas, including component design, algorithm optimization, and communication technology.
Looking to the future, trends such as miniaturization, the integration of AI and ML, the adoption of new communication technologies, and the development of self - powering capabilities offer great potential for further enhancing the performance and capabilities of low - power RTK GNSS embedded modules. As these trends develop, these modules will play an increasingly important role in a wide range of applications, contributing to the advancement of IoT, transportation, environmental monitoring, and many other fields.

 86 0755 2819 9597
86 0755 2819 9597
Lucy Yang | lucy.y@toxutech.com
Nicole Li | nicole@toxutech.com
Dotty Zhao | sales04@toxutech.com
Global Business Director / Sales Team / Global Operations










 En
En Cn
Cn Korean
Korean Home >
Home > 


