

-
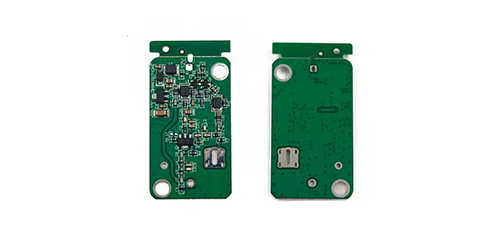
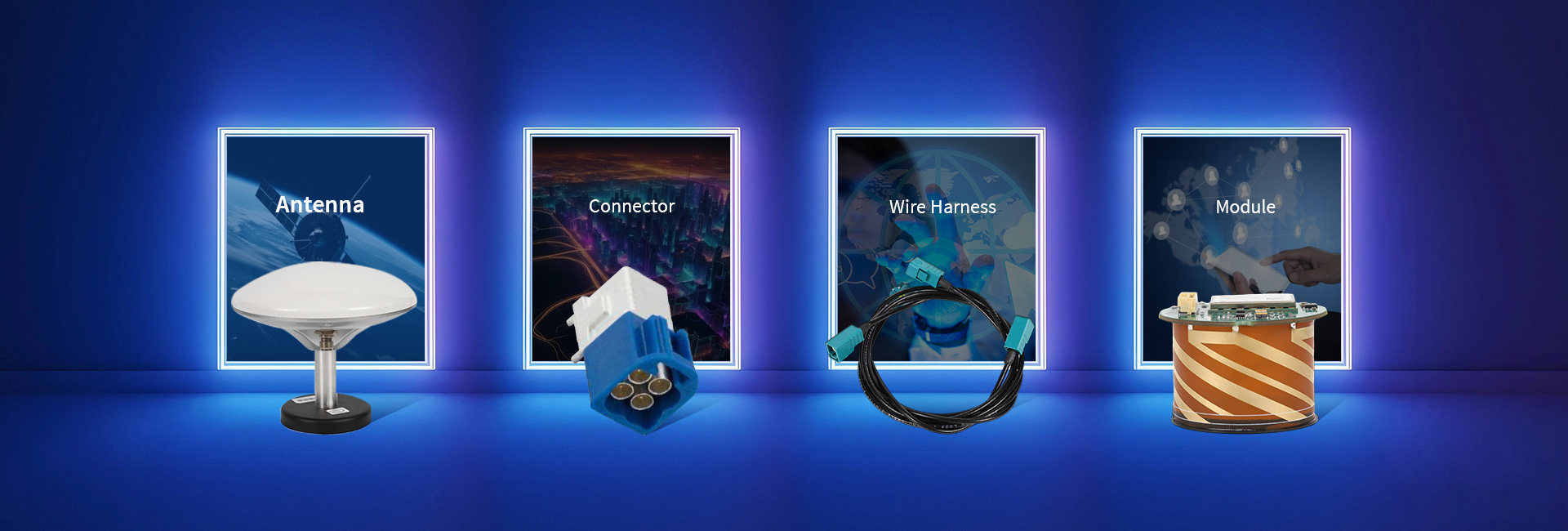
Products -PCBA Manufacturing RF Connectors RF Cable Assemblys Embedded Antennas External Antennas Positioning Chips and Modules
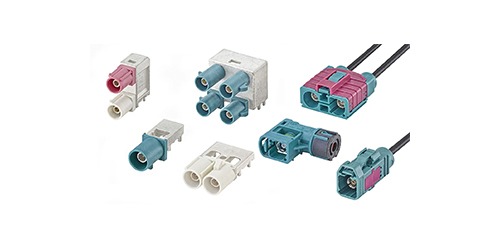
RF Connectors

RF Cable Assemblys
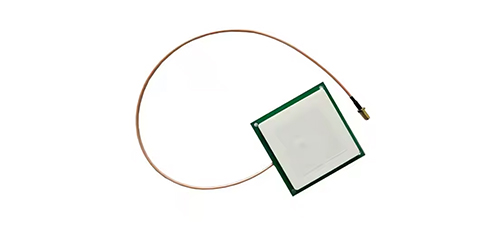
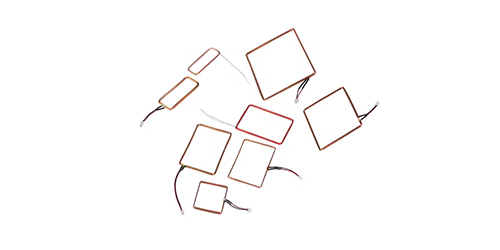
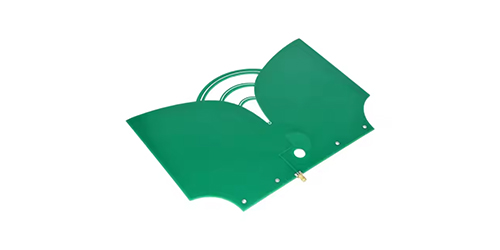
Embedded Antennas
External Antennas
Positioning Chips and Modules































 Language
Language


Language


An integrated embedded Real - Time Kinematic (RTK) Global Navigation Satellite System (GNSS) antenna represents a cutting - edge integration of high - precision positioning technology and compact, embedded design. Unlike traditional standalone GNSS antennas that often require external mounting and additional hardware for RTK functionality, this integrated solution combines the antenna element, RTK receiver module, signal processing circuitry, and power management components into a single, miniaturized unit. The core concept revolves around delivering centimeter - level positioning accuracy in real - time while meeting the space - constrained, low - power, and high - reliability demands of modern embedded applications.
GNSS itself encompasses a range of satellite constellations, including the United States' GPS, Russia's GLONASS, the European Union's Galileo, and China's BeiDou. RTK technology enhances the accuracy of GNSS positioning by using a fixed reference station to send correction data to a rover (the integrated embedded antenna unit) in real - time. This correction data compensates for errors such as ionospheric delays, tropospheric interference, satellite clock drifts, and multipath effects, which are major contributors to the meter - level inaccuracies of standard GNSS systems. The integration of these RTK capabilities into an embedded antenna eliminates the need for separate wiring, bulky enclosures, and complex system integration, making it an ideal choice for applications where space, weight, and ease of deployment are critical.
1.2 Evolution and Market Context
The evolution of integrated embedded RTK GNSS antennas can be traced back to the advancements in both GNSS technology and embedded systems over the past few decades. In the early days of GNSS, positioning systems were primarily used in large - scale applications such as surveying and aviation, with equipment that was heavy, expensive, and required significant power. The introduction of RTK in the 1990s marked a major leap forward in positioning accuracy, but early RTK systems still relied on separate antennas, receivers, and data links, limiting their use to specialized fields.
As embedded systems became more powerful and miniaturized in the 2000s, driven by the growth of the Internet of Things (IoT) and mobile devices, there was a growing demand for high - precision positioning in smaller, more portable applications. This led to the development of integrated RTK GNSS modules, which combined the receiver and processing circuitry. However, these modules still required external antennas, which added complexity and space requirements. The next step in the evolution was the integration of the antenna element directly into the module, creating the integrated embedded RTK GNSS antenna as we know it today.
In terms of the market context, the global integrated embedded RTK GNSS antenna market has experienced significant growth in recent years, driven by a wide range of applications across industries such as agriculture, construction, automotive, robotics, and consumer electronics. According to industry reports, the market size is expected to continue expanding at a compound annual growth rate (CAGR) of over 15% in the coming years. Factors contributing to this growth include the increasing demand for autonomous vehicles, the adoption of precision agriculture techniques to improve crop yields, the growth of smart cities requiring accurate positioning for infrastructure management, and the rising popularity of drones for both commercial and consumer use.
1.3 Key Components and System Integration
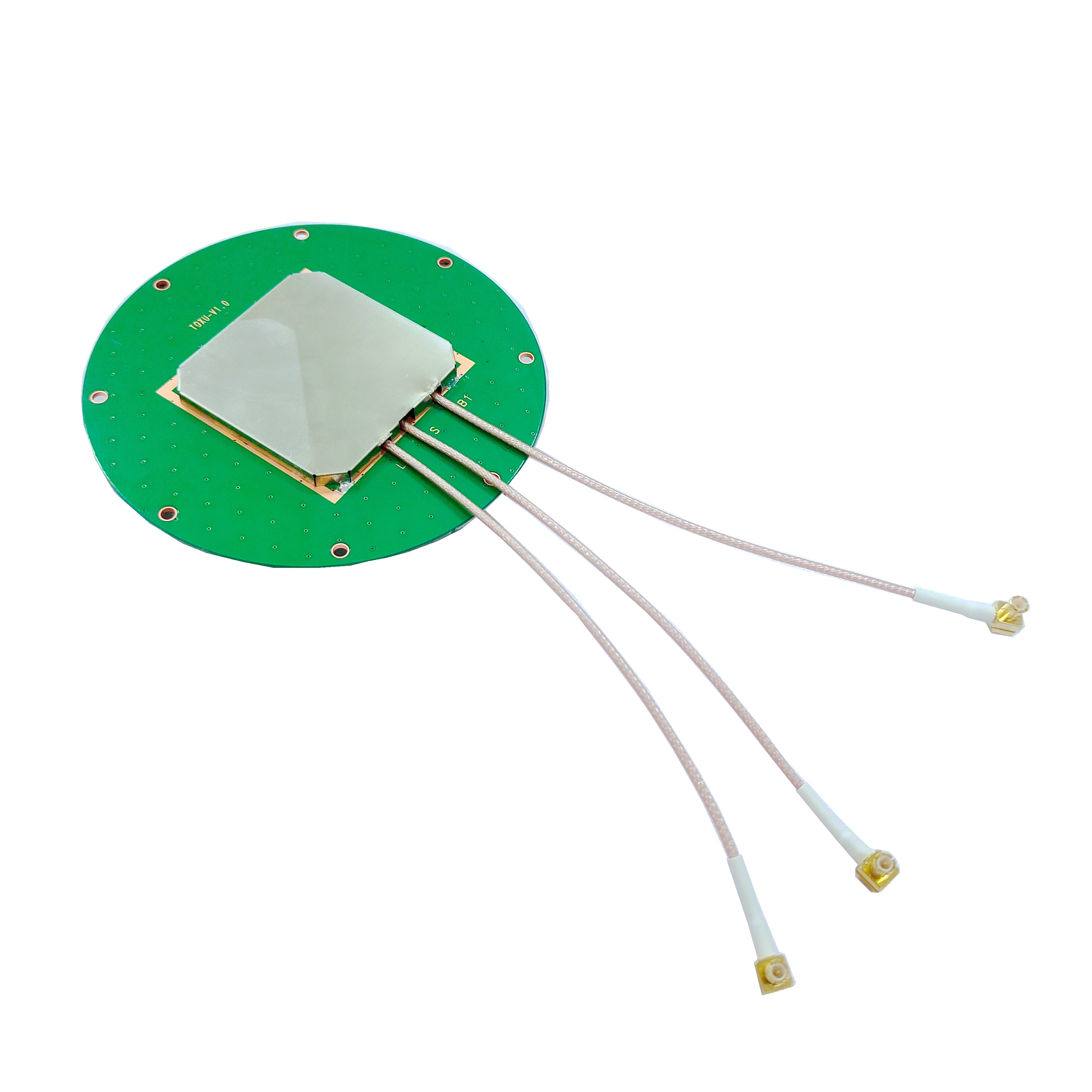
An integrated embedded RTK GNSS antenna consists of several key components that work together to deliver high - precision real - time positioning. The first and most critical component is the antenna element, which is responsible for receiving GNSS signals from multiple satellites. The antenna element is typically designed using microstrip technology, which allows for a compact, low - profile design that can be easily embedded into various devices. It is optimized to receive signals across the frequency bands used by different GNSS constellations, ensuring compatibility and maximum signal reception.
The second key component is the RTK receiver module, which processes the signals received by the antenna. The receiver module includes a radio frequency (RF) front - end that amplifies and filters the incoming signals, a baseband processor that demodulates the signals and extracts the satellite ephemeris and pseudorange data, and an RTK engine that applies the correction data from the reference station to compute the precise position. The RTK engine uses advanced algorithms to calculate the differences between the measurements from the rover and the reference station, eliminating common errors and achieving centimeter - level accuracy.
Another important component is the signal processing circuitry, which includes digital signal processors (DSPs) and microcontrollers (MCUs) that handle the data processing and communication tasks. The DSPs are responsible for performing complex mathematical operations required for signal filtering, error correction, and position calculation, while the MCUs manage the overall system operation, including power management, data storage, and communication with external devices via interfaces such as UART, SPI, or I2C.
Power management components are also essential for the integrated embedded RTK GNSS antenna, as they ensure efficient power usage, especially in battery - powered applications. These components include voltage regulators, power management ICs (PMICs), and low - power modes that allow the antenna to operate for extended periods on a single battery charge.
System integration is a key aspect of the design of integrated embedded RTK GNSS antennas. The components must be tightly integrated to minimize size, weight, and power consumption (SWaP). This requires careful layout of the printed circuit board (PCB) to reduce signal interference between the antenna element and the other electronic components. Shielding techniques may also be used to protect the sensitive RF circuitry from electromagnetic interference (EMI) generated by other components in the device or from external sources. Additionally, the antenna must be calibrated during the manufacturing process to ensure optimal performance, including accurate phase center alignment and signal gain.
2.1 Antenna Element Design
The design of the antenna element is a critical factor in determining the performance of an integrated embedded RTK GNSS antenna. The primary goal is to create an antenna that can receive GNSS signals from multiple constellations with high gain, low noise, and good polarization characteristics, while maintaining a compact and low - profile form factor suitable for embedded applications.
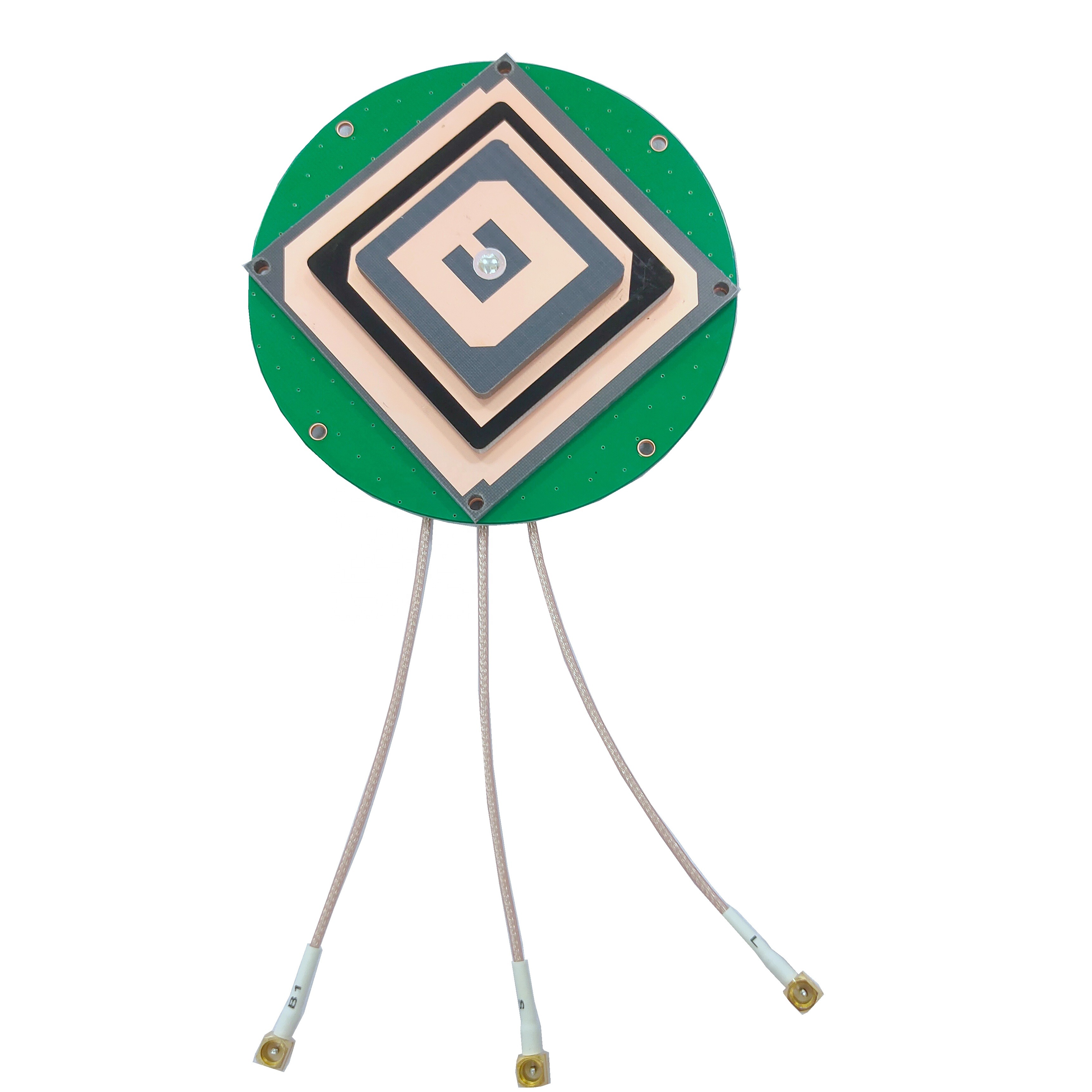
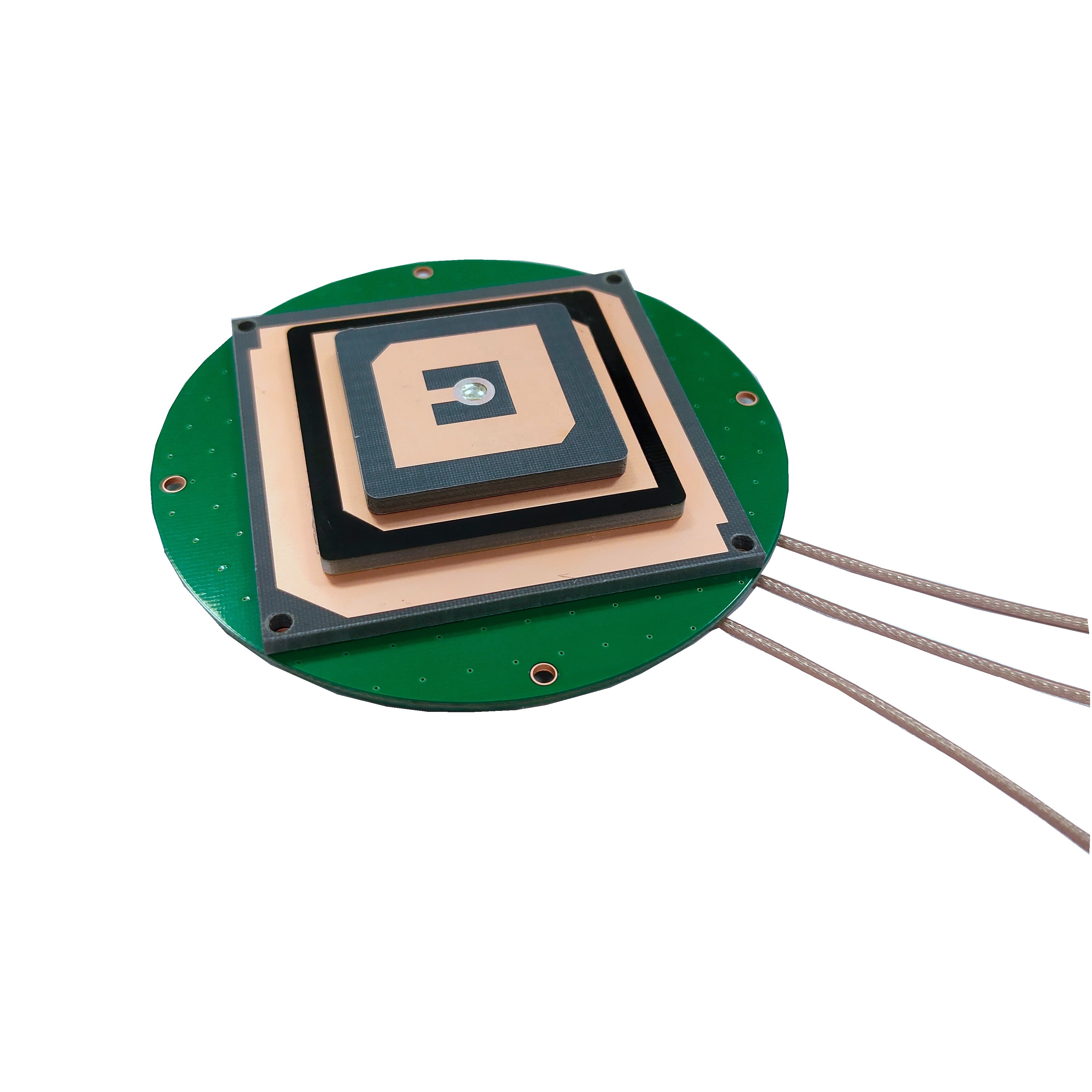
Microstrip antennas, also known as patch antennas, are the most commonly used type of antenna element in integrated embedded RTK GNSS antennas. This is because they offer several advantages, including a thin profile, lightweight, low cost, and ease of integration with PCBs. A typical microstrip antenna consists of a metallic patch on a dielectric substrate, with a ground plane on the opposite side of the substrate. The size and shape of the patch, as well as the properties of the dielectric substrate, determine the operating frequency of the antenna.
To cover the multiple frequency bands used by different GNSS constellations (e.g., GPS L1 (1575.42 MHz), GPS L2 (1227.60 MHz), GLONASS G1 (1602 MHz), GLONASS G3 (1202.025 MHz), Galileo E1 (1575.42 MHz), Galileo E5b (1207.14 MHz), BeiDou B1I (1561.098 MHz), BeiDou B2I (1207.14 MHz)), the antenna element must be designed to be multiband. There are several approaches to designing multiband microstrip antennas, including using a single patch with multiple resonant frequencies, stacking multiple patches on top of each other, or using a planar inverted - F antenna (PIFA) structure.
A common approach for multiband operation is to use a single patch with a modified shape, such as a rectangular patch with slots or notches cut into it. The slots or notches introduce additional resonant frequencies, allowing the antenna to operate at multiple bands. For example, a rectangular patch with a U - shaped slot can resonate at two different frequencies, covering two GNSS bands. Another approach is to use a stacked patch design, where two or more patches are stacked vertically on the same dielectric substrate, each tuned to a different frequency band. This design offers better isolation between the bands and higher gain compared to the single - patch with slots design, but it increases the thickness of the antenna, which may be a drawback for some embedded applications.
The choice of dielectric substrate is also important in the design of the antenna element. The substrate's dielectric constant (εr) and loss tangent (tanδ) affect the antenna's performance. A higher dielectric constant allows for a smaller patch size, which is beneficial for miniaturization, but it may also increase the losses in the antenna, reducing its gain and efficiency. A lower loss tangent is desirable to minimize signal attenuation. Common dielectric substrates used in microstrip antennas include FR - 4 (εr ≈ 4.4, tanδ ≈ 0.02), Rogers 4350 (εr ≈ 3.48, tanδ ≈ 0.004), and Teflon (εr ≈ 2.1, tanδ ≈ 0.0002). Rogers 4350 and Teflon are often preferred for high - performance GNSS antennas due to their low loss tangent, which results in better signal reception and higher efficiency.
The ground plane of the microstrip antenna also plays a crucial role in its performance. The ground plane acts as a reflector, directing the electromagnetic radiation from the patch upwards, and it also helps to reduce interference from the underlying electronic components. The size of the ground plane should be at least several times the wavelength of the highest operating frequency to ensure proper radiation characteristics. In embedded applications, where space is limited, the ground plane may be integrated into the PCB of the device, but care must be taken to ensure that it is large enough to not degrade the antenna's performance.
2.2 RTK Receiver Module Design
The RTK receiver module is the "brain" of the integrated embedded RTK GNSS antenna, responsible for processing the GNSS signals received by the antenna element and computing the precise position using RTK technology. The design of the receiver module must balance performance, power consumption, and size to meet the requirements of embedded applications.
The RF front - end is the first part of the receiver module that the GNSS signals encounter. It consists of a low - noise amplifier (LNA), a mixer, a local oscillator (LO), and a filter. The LNA amplifies the weak GNSS signals received by the antenna while introducing minimal noise, which is critical for maintaining the signal - to - noise ratio (SNR) of the signals. The mixer converts the RF signals to intermediate frequency (IF) signals, which are easier to process. The LO provides the reference frequency for the mixer, and its stability is essential for accurate frequency conversion. The filter removes unwanted noise and interference from the IF signals, ensuring that only the desired GNSS signals are passed to the baseband processor.
The baseband processor is responsible for demodulating the IF signals and extracting the useful information, such as the satellite ephemeris, clock corrections, and pseudorange measurements. It uses correlators to compare the received signals with locally generated replica signals of the GNSS codes (e.g., C/A code for GPS L1). The correlators compute the correlation between the received and replica signals, which allows the baseband processor to determine the time delay between the transmission of the signal from the satellite and its reception by the antenna (the pseudorange). The baseband processor also decodes the navigation data contained in the GNSS signals, which includes information about the satellite's position, velocity, and clock offset.
The RTK engine is the core component of the receiver module that enables centimeter - level positioning. It receives the pseudorange measurements from the baseband processor and the correction data from the reference station (via a wireless data link such as Bluetooth, Wi - Fi, or a cellular network). The correction data includes the reference station's known position and the errors measured at the reference station, such as ionospheric delay, tropospheric delay, and satellite clock error. The RTK engine uses a technique called differential positioning to compute the difference between the pseudorange measurements from the rover (the integrated embedded antenna) and the reference station. By subtracting the common errors (which affect both the rover and the reference station), the RTK engine can eliminate most of the errors and compute the rover's position with centimeter - level accuracy.
The design of the RTK engine requires advanced algorithms to handle the large amount of data and perform the complex calculations in real - time. One of the key algorithms used is the least squares adjustment, which minimizes the sum of the squared differences between the observed pseudoranges and the computed pseudoranges based on the estimated position. Another important algorithm is the Kalman filter, which is used to smooth the position estimates and improve the stability of the positioning solution. The Kalman filter takes into account the noise in the measurements and the dynamics of the rover (e.g., velocity, acceleration) to predict the next position and update it with the new measurements.
Power consumption is a major concern in the design of the RTK receiver module, especially for battery - powered embedded applications. To reduce power consumption, the receiver module can be designed to operate in different power modes, such as a high - performance mode for when high accuracy is required and a low - power mode for when the device is idle or only needs low - accuracy positioning. In low - power mode, some components of the receiver module, such as the LNA or the RTK engine, can be turned off or operated at a lower clock frequency to save power. Additionally, the use of low - power components, such as CMOS (Complementary Metal - Oxide - Semiconductor) integrated circuits, can help reduce the overall power consumption of the module.
2.3 PCB Layout and Shielding
The PCB layout of an integrated embedded RTK GNSS antenna is crucial for ensuring optimal performance, as it affects the signal integrity, power distribution, and electromagnetic compatibility (EMC) of the system. A well - designed PCB layout can minimize signal interference, reduce power losses, and ensure that all components operate correctly.
One of the key considerations in PCB layout is the separation of the RF circuitry (including the antenna element and the RF front - end of the receiver module) from the digital circuitry (such as the baseband processor, RTK engine, and MCU). RF signals are highly sensitive to interference from digital signals, which can cause noise and distortion, degrading the performance of the antenna. To minimize this interference, the RF and digital sections of the PCB should be separated by a ground plane or a shielding wall. The ground plane acts as a barrier between the two sections, preventing the digital signals from coupling into the RF circuitry. Additionally, the traces carrying RF signals should be kept as short as possible and should be routed away from digital traces to avoid crosstalk.
The routing of the power supply traces is also important in PCB layout. The power supply to the RF circuitry must be clean and stable, as any noise in the power supply can be coupled into the RF signals, affecting their quality. To ensure a clean power supply, separate power supply traces should be used for the RF and digital sections, and decoupling capacitors should be placed close to the power pins of each component. Decoupling capacitors act as local energy storage devices, providing a stable voltage to the components and filtering out any noise in the power supply.
Another consideration in PCB layout is the placement of the antenna element. The antenna element should be placed in a location on the PCB where it has a clear view of the sky, to maximize signal reception. It should also be placed away from other components that may cause interference, such as high - speed digital circuits, power amplifiers, or antennas operating at other frequencies. Additionally, the antenna element should be aligned with the ground plane to ensure proper radiation characteristics.
Shielding is an important technique used to protect the sensitive RF circuitry from EMI. EMI can come from both internal sources (such as other components in the device) and external sources (such as other electronic devices, power lines, or radio transmitters). Shielding can be achieved by enclosing the RF circuitry in a metallic shield, which reflects the electromagnetic waves and prevents them from entering or exiting the shielded area. The shield should be connected to the ground plane of the PCB to ensure that it provides effective shielding. There are several types of shielding available, including tin cans, conductive foils, and shielding gaskets. The choice of shielding depends on the level of EMI protection required, the size and shape of the circuitry, and the cost constraints.
In addition to shielding the RF circuitry, it is also important to consider the EMC of the entire device. The integrated embedded RTK GNSS antenna should comply with relevant EMC standards, such as the CISPR (International Special Committee on Radio Interference) standards, which specify the limits for electromagnetic emissions and immunity. To ensure compliance, the PCB layout should be designed to minimize electromagnetic emissions from the digital circuitry, and the device should be tested for EMC during the development process.
2.4 Enclosure Design and Environmental Considerations
The enclosure of an integrated embedded RTK GNSS antenna plays an important role in protecting the internal components from environmental factors such as moisture, dust, temperature extremes, and physical damage. It also affects the antenna's performance by influencing the signal reception and radiation characteristics.
The material used for the enclosure is a key consideration. It should be durable, lightweight, and have good dielectric properties to minimize the attenuation of GNSS signals. Common materials used for enclosures include plastic (such as ABS, polycarbonate, and nylon), aluminum, and composite materials. Plastic is often preferred for its low cost, lightweight, and ease of molding into complex shapes. However, some plastics may have high dielectric losses, which can reduce the antenna's gain and efficiency. To minimize this, plastic enclosures can be coated with a thin layer of metal (such as copper or aluminum) to improve the dielectric properties, but this may increase the cost and weight of the enclosure.
Aluminum enclosures offer good durability and electromagnetic shielding, but they are heavier than plastic and can reflect GNSS signals, which may degrade the antenna's performance. To avoid this, the part of the enclosure covering the antenna element should be made of a non - metallic material, or a window made of a low - loss dielectric material (such as Teflon or acrylic) should be provided. Composite materials, such as carbon fiber reinforced plastic (CFRP), offer a good balance of durability, lightweight, and low dielectric losses, making them an ideal choice for high - performance applications. However, they are more expensive than plastic or aluminum.
The design of the enclosure should also take into account the environmental conditions in which the antenna will be used. For example, if the antenna is intended for use in outdoor applications such as agriculture or construction, it should be waterproof and dustproof,complying with international protection standards such as IP67 or IP68. IP67 enclosures are dust-tight and can withstand immersion in water up to 1 meter for 30 minutes, while IP68 enclosures offer even higher protection, capable of withstanding prolonged immersion in water at greater depths. To achieve this level of protection, the enclosure should be sealed using gaskets made of materials such as rubber or silicone, which create a tight seal between the enclosure and its lid. The gaskets should be designed to withstand the environmental conditions the antenna will be exposed to, including temperature variations and chemical exposure.
Temperature is another critical environmental factor that must be considered in enclosure design. Integrated embedded RTK GNSS antennas may be used in extreme temperature environments, ranging from -40°C in cold climates to 85°C or higher in hot climates. The enclosure material and the internal components must be able to withstand these temperature extremes without degrading in performance. For example, plastic enclosures may become brittle at low temperatures, leading to cracking, while high temperatures can cause the plastic to melt or deform. To address this, temperature-resistant materials such as high-temperature polycarbonate or ceramic can be used for the enclosure. Additionally, thermal management techniques may be required to dissipate heat generated by the internal components, especially the RTK receiver module and signal processing circuitry. This can include the use of heat sinks, thermal vias in the PCB, or fans for forced air cooling, depending on the power dissipation of the components and the operating temperature range.
Physical damage is also a concern, especially for antennas used in rugged applications such as construction or off-road vehicles. The enclosure should be designed to withstand impacts, vibrations, and shocks. Impact resistance can be improved by using materials with high toughness, such as polycarbonate or aluminum, and by incorporating features such as reinforced corners or a shock-absorbing layer inside the enclosure. Vibration and shock resistance can be enhanced by mounting the internal components to the enclosure using vibration-damping materials, such as foam or rubber, which absorb the energy from vibrations and shocks, preventing damage to the components.
In addition to protecting the internal components, the enclosure design must also consider the antenna's radiation pattern. The enclosure can affect the antenna's radiation pattern by reflecting or absorbing the electromagnetic waves emitted by the antenna element. To minimize this effect, the part of the enclosure covering the antenna element should be made of a low-loss dielectric material with a uniform thickness, and it should be designed to avoid creating any obstacles or irregularities that could distort the radiation pattern. The enclosure should also be sized and shaped to allow the antenna to radiate freely, without blocking the signals in any direction.
3.1 Basic GNSS Positioning Principles
Before delving into the specific working principles of the integrated embedded RTK GNSS antenna, it is essential to understand the basic principles of GNSS positioning. GNSS positioning relies on the measurement of the distance between the receiver (the integrated embedded antenna) and multiple satellites in orbit around the Earth. This distance, known as the pseudorange, is calculated based on the time it takes for a signal transmitted by a satellite to reach the receiver.
Each GNSS satellite transmits a unique code (such as the C/A code for GPS L1) and navigation data at a specific frequency. The navigation data includes information about the satellite's position (ephemeris data) and the satellite's clock offset relative to a global time standard. When the receiver receives the signal from a satellite, it uses a correlator to compare the received code with a locally generated replica of the code. The time delay between the received code and the replica code is used to calculate the pseudorange.
To determine the receiver's position in three-dimensional space (latitude, longitude, and altitude), the receiver needs to measure the pseudoranges to at least four satellites. This is because the receiver's position has three unknowns (x, y, z coordinates) and the receiver's clock offset (which introduces an error in the pseudorange measurements) is a fourth unknown. By solving a system of four equations based on the pseudoranges to four satellites, the receiver can compute its position.
However, standard GNSS positioning is subject to several sources of error, which limit its accuracy to the meter level. These errors include ionospheric delay, tropospheric delay, satellite clock error, satellite ephemeris error, multipath error, and receiver noise. Ionospheric delay occurs when the GNSS signal passes through the ionosphere, a layer of the Earth's atmosphere containing charged particles, which causes the signal to slow down. Tropospheric delay is caused by the Earth's troposphere, which contains water vapor and other gases that also affect the signal's speed. Satellite clock error is the difference between the satellite's onboard clock and the global time standard, while satellite ephemeris error is the inaccuracy in the satellite's reported position. Multipath error occurs when the GNSS signal reflects off nearby objects (such as buildings, trees, or the ground) before reaching the receiver, leading to multiple signals arriving at the receiver at slightly different times. Receiver noise is the random noise introduced by the receiver's electronics, which affects the accuracy of the pseudorange measurements.
3.2 RTK Technology: Enhancing Accuracy with Correction Data
RTK technology addresses the limitations of standard GNSS positioning by using a fixed reference station to provide real-time correction data to the rover (the integrated embedded RTK GNSS antenna). The reference station is a GNSS receiver installed at a known, surveyed location. It continuously measures the pseudoranges to the same satellites as the rover and compares these measurements with the expected pseudoranges based on its known position. The difference between the measured pseudoranges and the expected pseudoranges is the error at the reference station, which includes the common errors affecting both the reference station and the rover (such as ionospheric delay, tropospheric delay, and satellite clock error).
The reference station transmits this correction data to the rover via a wireless data link, such as Bluetooth, Wi-Fi, a cellular network (3G, 4G, 5G), or a dedicated radio link. The correction data typically includes information about the ionospheric delay, tropospheric delay, satellite clock error, and satellite ephemeris error at the reference station. The rover receives this correction data and applies it to its own pseudorange measurements to eliminate the common errors.
The key principle of RTK technology is that the errors affecting the reference station and the rover are highly correlated, especially when the two are located within a relatively small distance (typically less than 10-20 kilometers). This is because the ionospheric and tropospheric conditions are similar over a small area, and the satellite clock and ephemeris errors are the same for both the reference station and the rover. By subtracting the correction data from the rover's pseudorange measurements, the common errors are eliminated, allowing the rover to compute its position with centimeter-level accuracy.
There are two main types of RTK positioning: single-base RTK and network RTK. Single-base RTK uses a single reference station, and the correction data is transmitted directly from the reference station to the rover. This type of RTK is suitable for applications where the rover is within a short distance of the reference station, as the correlation of errors decreases with increasing distance between the reference station and the rover. Network RTK, on the other hand, uses a network of reference stations covering a large area. The reference stations in the network transmit their correction data to a central processing center, which combines the data to generate a regional correction model. The rover then receives the correction data from the central processing center, which is tailored to its specific location. Network RTK offers several advantages over single-base RTK, including a larger coverage area, higher accuracy, and better reliability, as it is not dependent on a single reference station.
3.3 Signal Flow in Integrated Embedded RTK GNSS Antenna
The integrated embedded RTK GNSS antenna follows a specific signal flow to receive GNSS signals, process them, apply RTK corrections, and compute the precise position. The signal flow can be broken down into several key steps:
3.3.1 Signal Reception by the Antenna Element
The first step in the signal flow is the reception of GNSS signals by the antenna element. The antenna element, typically a multiband microstrip antenna, is designed to receive signals from multiple GNSS constellations (GPS, GLONASS, Galileo, BeiDou) across their respective frequency bands. The antenna element converts the electromagnetic signals from the satellites into electrical signals, which are then passed to the RF front-end of the RTK receiver module.
3.3.2 RF Front-End Processing
The RF front-end is responsible for amplifying, filtering, and converting the received electrical signals into a form that can be processed by the baseband processor. The low-noise amplifier (LNA) in the RF front-end amplifies the weak electrical signals from the antenna element while introducing minimal noise, which is critical for maintaining a high signal-to-noise ratio (SNR). The amplified signals are then passed through a band-pass filter, which removes unwanted noise and interference outside the frequency bands of the GNSS signals.
Next, the mixer in the RF front-end converts the filtered RF signals to intermediate frequency (IF) signals. This conversion is done by mixing the RF signals with a reference frequency generated by the local oscillator (LO). The IF signals are easier to process than the RF signals because they have a lower frequency, which allows for the use of lower-cost and lower-power components in the subsequent processing stages. The IF signals are then passed through another filter to remove any remaining noise or interference introduced during the mixing process.
3.3.3 Baseband Processing
The baseband processor receives the filtered IF signals and performs several key tasks, including demodulation, code correlation, and navigation data extraction. The demodulation process separates the GNSS code and navigation data from the IF carrier signal. The code correlation process uses correlators to compare the received GNSS code with a locally generated replica code. The time delay between the received code and the replica code is measured, which is used to calculate the pseudorange to the satellite.
The baseband processor also decodes the navigation data contained in the GNSS signals. The navigation data includes the satellite's ephemeris data (which provides the satellite's position and velocity at the time of transmission) and the satellite's clock correction data (which compensates for the satellite's clock offset relative to the global time standard). This information is essential for calculating the expected pseudoranges based on the satellite's position and the receiver's estimated position.
3.3.4 RTK Correction Data Reception and Processing
While the baseband processor is processing the GNSS signals, the integrated embedded antenna also receives RTK correction data from the reference station or central processing center via the wireless data link. The correction data is received by a separate communication module (such as a Bluetooth, Wi-Fi, or cellular module) and passed to the RTK engine.
The RTK engine processes the correction data to extract the error information, including the ionospheric delay, tropospheric delay, satellite clock error, and satellite ephemeris error. It then applies this error information to the pseudorange measurements from the baseband processor to correct for the common errors. For example, if the correction data indicates that the ionospheric delay at the reference station is 10 meters, the RTK engine subtracts 10 meters from the rover's pseudorange measurements to eliminate the ionospheric delay error.
3.3.5 Precise Position Calculation
After applying the RTK corrections, the RTK engine uses the corrected pseudorange measurements to compute the rover's precise position. This is done using advanced algorithms such as the least squares adjustment and the Kalman filter. The least squares adjustment algorithm minimizes the sum of the squared differences between the corrected pseudoranges and the computed pseudoranges based on the estimated position. This algorithm is used to compute an initial position estimate.
The Kalman filter is then used to refine the position estimate and improve the stability of the positioning solution. The Kalman filter takes into account the noise in the corrected pseudorange measurements and the dynamics of the rover (such as its velocity and acceleration) to predict the rover's next position. It then updates this predicted position with the new corrected pseudorange measurements, resulting in a more accurate and stable position estimate.
The computed position (latitude, longitude, and altitude) is then passed to the microcontroller (MCU), which can store the position data in memory, display it on a user interface, or transmit it to an external device via a communication interface (such as UART, SPI, or I2C) for further processing or use in the application.
3.4 Factors Affecting the Working Performance
Several factors can affect the working performance of an integrated embedded RTK GNSS antenna, including signal reception conditions, the quality of the correction data, the distance between the rover and the reference station, and environmental interference.
3.4.1 Signal Reception Conditions
The quality of the GNSS signal reception is a critical factor affecting the performance of the antenna. Poor signal reception can result from a variety of factors, including obstructions (such as buildings, trees, or terrain), signal attenuation, and multipath effects. Obstructions can block the GNSS signals from reaching the antenna, reducing the number of visible satellites and increasing the pseudorange measurement errors. Signal attenuation can occur when the signals pass through materials such as metal, concrete, or water, which absorb or reflect the signals. Multipath effects, as mentioned earlier, occur when the signals reflect off nearby objects before reaching the antenna, leading to multiple signals arriving at the receiver at different times, which can cause errors in the pseudorange measurements.
To mitigate the effects of poor signal reception, the antenna element should be placed in a location with a clear view of the sky, away from obstructions. Additionally, the antenna can be designed with features such as high gain and low noise to improve the reception of weak signals. Anti-multipath techniques, such as the use of a choke ring antenna (which reduces the reception of reflected signals) or signal processing algorithms that can detect and eliminate multipath signals, can also be used to improve signal reception quality.
3.4.2 Quality of the Correction Data
The quality of the RTK correction data is another key factor affecting the performance of the antenna. The correction data must be accurate, timely, and reliable to ensure that the common errors are effectively eliminated. Inaccurate correction data can lead to errors in the corrected pseudorange measurements, resulting in a less accurate position estimate. Delays in the transmission of the correction data can also affect performance, as the correction data is time-sensitive and must be applied to the pseudorange measurements within a short time window to be effective.
To ensure the quality of the correction data, the reference station or central processing center should be calibrated regularly to maintain its accuracy. The wireless data link used to transmit the correction data should be reliable and have low latency to minimize delays. Additionally, error detection and correction mechanisms can be implemented in the communication module to ensure that the correction data is received correctly and without corruption.
3.4.3 Distance Between Rover and Reference Station
The distance between the rover (integrated embedded antenna) and the reference station has a significant impact on the performance of RTK positioning. As mentioned earlier, the errors affecting the reference station and the rover are highly correlated when they are close together, but this correlation decreases as the distance increases. This is because the ionospheric and tropospheric conditions can vary over large distances, leading to differences in the errors at the reference station and the rover. As a result, the correction data from the reference station becomes less effective at eliminating the errors for the rover when the distance is large.
In single-base RTK, the maximum effective distance between the rover and the reference station is typically around 10-20 kilometers. Beyond this distance, the accuracy of the positioning solution may degrade to the decimeter or meter level. Network RTK addresses this limitation by using a network of reference stations, which allows for a larger coverage area (up to several hundred kilometers) and maintains high accuracy even at greater distances. This is because the central processing center in network RTK generates a regional correction model that takes into account the spatial variations in the errors, providing more accurate correction data for the rover regardless of its location within the network coverage area.
3.4.4 Environmental Interference
Environmental interference, such as electromagnetic interference (EMI) and radio frequency interference (RFI), can also affect the performance of the integrated embedded RTK GNSS antenna. EMI can come from internal sources (such as other components in the device, such as the MCU, DSP, or power supply) or external sources (such as power lines, radio transmitters, or other electronic devices). RFI is interference caused by other radio signals operating in the same or adjacent frequency bands as the GNSS signals.
EMI and RFI can cause noise and distortion in the GNSS signals, reducing the SNR and increasing the pseudorange measurement errors. To mitigate the effects of environmental interference, the antenna should be designed with effective shielding to protect the sensitive RF circuitry from EMI. The PCB layout should also be optimized to minimize the generation of EMI from the internal components. Additionally, the antenna can be designed with filters to reject RFI from other radio signals, ensuring that only the desired GNSS signals are received and processed.
4.1 Key Advantages
Integrated embedded RTK GNSS antennas offer a wide range of advantages over traditional standalone GNSS antennas and separate RTK systems, making them well-suited for a variety of embedded applications. These advantages include high positioning accuracy, compact size and lightweight, easy integration, low power consumption, and real-time performance.
4.1.1 High Positioning Accuracy
The most significant advantage of integrated embedded RTK GNSS antennas is their ability to deliver centimeter-level positioning accuracy in real-time. This level of accuracy is far superior to the meter-level accuracy of standard GNSS systems and is essential for applications that require precise positioning, such as precision agriculture, construction surveying, autonomous robotics, and drone navigation. The use of RTK technology, which applies real-time correction data from a reference station, eliminates most of the common errors affecting GNSS positioning, ensuring that the antenna can provide highly accurate position information even in challenging environments.
For example, in precision agriculture, centimeter-level accuracy allows farmers to precisely apply fertilizers, pesticides, and irrigation to specific areas of a field, reducing waste and improving crop yields. In construction surveying, it enables surveyors to accurately measure the position of structures, roads, and other infrastructure, ensuring that theconstruction projects adhere to design specifications and avoid costly rework. In autonomous robotics, this accuracy ensures that robots can navigate through complex environments with precision, avoiding obstacles and completing tasks with high efficiency. For drone navigation, centimeter-level positioning is crucial for applications such as aerial mapping, inspection of infrastructure (e.g., power lines, bridges), and delivery of goods, where even small positioning errors could lead to accidents or failed missions.
4.1.2 Compact Size and Lightweight
Another major advantage of integrated embedded RTK GNSS antennas is their compact size and lightweight design. Unlike traditional RTK systems, which consist of separate antennas, receivers, and data processing units that are often large and heavy, integrated embedded antennas combine all key components (antenna element, RTK receiver module, signal processing circuitry, power management) into a single, miniaturized unit. This compact form factor makes them ideal for embedded applications where space is limited, such as in small drones, wearable devices, portable surveying tools, and automotive telematics systems.
The lightweight nature of these antennas also offers benefits in applications where weight is a critical factor. For example, in drone applications, reducing the weight of the positioning system can extend the drone's flight time by reducing power consumption. In wearable devices, such as fitness trackers or location-based safety devices, a lightweight antenna ensures user comfort, making the device more practical for everyday use. Additionally, the compact size and lightweight design simplify the installation process, as the antenna can be easily mounted in tight spaces or integrated into the existing structure of the device without adding significant bulk or weight.
4.1.3 Easy Integration
Integrated embedded RTK GNSS antennas are designed for easy integration into a wide range of devices and systems, which is a key advantage for manufacturers and developers. These antennas typically come with standard communication interfaces, such as UART (Universal Asynchronous Receiver-Transmitter), SPI (Serial Peripheral Interface), I2C (Inter-Integrated Circuit), or USB (Universal Serial Bus), which are commonly used in embedded systems. This allows developers to easily connect the antenna to microcontrollers (MCUs), microprocessors (MPUs), or other electronic components without the need for custom hardware or complex wiring.
Furthermore, many integrated embedded RTK GNSS antennas are supplied with software development kits (SDKs) and application programming interfaces (APIs) that simplify the integration process. The SDKs provide pre-built functions and libraries for configuring the antenna, processing position data, and communicating with external devices, reducing the time and effort required for software development. The APIs allow developers to customize the antenna's functionality to meet the specific requirements of their application, such as adjusting the update rate of position data, setting up low-power modes, or integrating with other sensors (e.g., accelerometers, gyroscopes) for enhanced positioning performance.
The easy integration of these antennas also reduces the overall cost of the system, as it eliminates the need for specialized engineering expertise to design and implement a custom positioning solution. Manufacturers can quickly incorporate the antenna into their products, accelerating the time-to-market for new devices.
4.1.4 Low Power Consumption
Low power consumption is a critical advantage of integrated embedded RTK GNSS antennas, especially for battery-powered applications such as portable surveying tools, wearable devices, small drones, and IoT sensors. These antennas are designed with power-efficient components and optimized circuitry to minimize energy usage while maintaining high performance.
The RTK receiver module, which is a major contributor to power consumption, is often designed using low-power CMOS (Complementary Metal-Oxide-Semiconductor) technology. CMOS components consume power only when switching states, making them highly efficient for digital circuits. Additionally, the receiver module can be configured to operate in different power modes, such as a high-performance mode (for when centimeter-level accuracy is required) and a low-power mode (for when the device is idle or only needs periodic position updates). In low-power mode, non-essential components of the receiver module, such as the LNA (Low-Noise Amplifier) or the RTK engine, can be turned off or operated at a lower clock frequency to reduce power consumption.
The power management circuitry of the integrated embedded antenna also plays a key role in minimizing energy usage. It includes voltage regulators that provide a stable voltage to the components while minimizing power losses, and power management ICs (PMICs) that optimize the power distribution to different parts of the antenna. Some antennas also support energy-harvesting technologies, such as solar panels or kinetic energy harvesters, which can supplement the battery power and extend the device's operating time.
The low power consumption of these antennas allows battery-powered devices to operate for extended periods without the need for frequent recharging or battery replacement. For example, a portable surveying tool equipped with an integrated embedded RTK GNSS antenna can operate for up to 10-12 hours on a single battery charge, enabling surveyors to work a full day without interruption. In IoT sensors, which are often deployed in remote locations with limited access to power, low power consumption ensures that the sensor can operate for months or even years on a single battery, reducing maintenance costs and improving reliability.
4.1.5 Real-Time Performance
Integrated embedded RTK GNSS antennas deliver real-time positioning data, which is essential for applications that require immediate access to accurate position information. The RTK technology used in these antennas provides correction data in real-time, allowing the antenna to compute and update the position at a high rate (typically 1-10 Hz, and up to 100 Hz for high-performance applications). This real-time update rate ensures that the position data is always current, making the antenna suitable for dynamic applications such as autonomous vehicles, drones in flight, and robotics in motion.
In autonomous vehicles, for example, real-time centimeter-level positioning is critical for navigating through traffic, avoiding collisions, and staying within the correct lane. The high update rate of the integrated embedded antenna allows the vehicle's control system to quickly respond to changes in the environment, such as other vehicles changing lanes or pedestrians crossing the road. In drone applications, real-time positioning data is essential for maintaining stable flight, following a pre-defined flight path, and accurately landing the drone. The ability to update the position in real-time also enables the drone to adjust its flight path in response to unexpected obstacles or changes in weather conditions.
The real-time performance of these antennas is achieved through the efficient processing of GNSS signals and correction data. The RTK engine uses advanced algorithms, such as the Kalman filter, to quickly compute the position based on the corrected pseudorange measurements. The use of high-speed processors and optimized software ensures that the position data is generated and transmitted with minimal latency, typically less than 100 milliseconds, which is well within the requirements of most real-time applications.
4.2 Key Challenges
Despite their numerous advantages, integrated embedded RTK GNSS antennas also face several challenges that can limit their performance or restrict their use in certain applications. These challenges include dependence on reference stations and data links, vulnerability to signal blockages and interference, high cost, and environmental constraints.
4.2.1 Dependence on Reference Stations and Data Links
One of the most significant challenges of integrated embedded RTK GNSS antennas is their dependence on reference stations and reliable wireless data links to receive correction data. Without access to correction data, the antenna cannot achieve centimeter-level accuracy and will revert to standard GNSS positioning, which has meter-level accuracy. This dependence can be a limitation in applications where reference stations are not available, such as in remote areas, deserts, or oceans, where the infrastructure for reference stations is lacking.
Even in areas where reference stations are available, the performance of the antenna is highly dependent on the quality and reliability of the wireless data link used to transmit the correction data. If the data link is interrupted (e.g., due to poor signal strength, network congestion, or interference), the antenna will lose access to the correction data, and its accuracy will degrade. This can be a critical issue in applications where continuous high-accuracy positioning is essential, such as autonomous vehicles or drone delivery.
To address this challenge, some integrated embedded RTK GNSS antennas are designed to support multiple data link options (e.g., Bluetooth, Wi-Fi, cellular, and satellite), allowing the antenna to switch to an alternative data link if the primary link is interrupted. Additionally, the development of network RTK systems, which use a network of reference stations to provide regional correction data, has expanded the coverage area of RTK technology. However, network RTK still requires a reliable data link to connect to the central processing center, and coverage may still be limited in remote areas.
Another approach to mitigate this challenge is the use of post-processed kinematic (PPK) technology, which records the GNSS data and correction data and processes them after the fact to compute the precise position. While PPK does not require real-time data links, it cannot provide real-time positioning, making it unsuitable for applications that require immediate position information.
4.2.2 Vulnerability to Signal Blockages and Interference
Integrated embedded RTK GNSS antennas are highly vulnerable to signal blockages and interference, which can significantly degrade their performance. GNSS signals are weak and can be easily blocked by obstacles such as buildings, trees, mountains, or even the roof of a vehicle. In urban environments, where tall buildings are common, the antenna may struggle to receive signals from enough satellites to compute a position, leading to a loss of positioning accuracy or even a complete loss of signal (known as a "GNSS outage").
In addition to signal blockages, the antenna is also vulnerable to various types of interference, including electromagnetic interference (EMI), radio frequency interference (RFI), and intentional jamming or spoofing. EMI can come from internal components of the device (e.g., the MCU, power supply) or external sources (e.g., power lines, radio transmitters), while RFI is caused by other radio signals operating in the same or adjacent frequency bands as GNSS signals. Intentional jamming involves the transmission of strong radio signals to disrupt GNSS reception, while spoofing involves the transmission of fake GNSS signals to trick the antenna into computing an incorrect position.
These types of interference can cause noise and distortion in the GNSS signals, reducing the signal-to-noise ratio (SNR) and increasing the pseudorange measurement errors. In severe cases, interference can cause the antenna to lose its position fix entirely, making it unusable. This is a major concern in critical applications such as aviation, maritime navigation, or military operations, where a loss of positioning could have serious consequences.
To mitigate the effects of signal blockages and interference, several techniques can be used. For signal blockages, the antenna can be mounted in a location with a clear view of the sky, such as on the roof of a vehicle or the top of a drone. In urban environments, the use of multi-constellation GNSS (e.g., combining GPS, GLONASS, Galileo, and BeiDou) can increase the number of visible satellites, improving the chances of maintaining a position fix. Additionally, the use of anti-multipath antennas (e.g., choke ring antennas) or signal processing algorithms that can detect and eliminate multipath signals can help reduce the impact of signal reflections.
To address interference, the antenna can be designed with shielding to protect the sensitive RF circuitry from EMI. Filters can also be incorporated into the RF front-end to reject RFI from other radio signals. For intentional jamming and spoofing, more advanced techniques are required, such as the use of adaptive beamforming antennas (which can focus on the desired GNSS signals and reject jamming signals), cryptographic authentication of GNSS signals (to detect spoofing), or the integration of alternative positioning technologies (e.g., inertial navigation systems (INS), LiDAR, or cameras) to provide backup positioning when GNSS signals are compromised.
4.2.3 High Cost
Integrated embedded RTK GNSS antennas are typically more expensive than standard GNSS antennas or standalone RTK components, which can be a barrier to their adoption in cost-sensitive applications. The high cost is due to several factors, including the use of high-performance components (e.g., low-noise amplifiers, high-speed processors, and precision oscillators), the complexity of integrating multiple components into a single unit, and the cost of calibrating the antenna to ensure optimal performance.
The RTK receiver module, which is a key component of the integrated antenna, is particularly expensive. It requires advanced signal processing capabilities to handle the complex calculations involved in RTK positioning, and the use of high-quality components to ensure accuracy and reliability. Additionally, the development of the software and algorithms used in the RTK engine requires significant research and development (R&D) investment, which is reflected in the cost of the antenna.
The high cost of integrated embedded RTK GNSS antennas can limit their use in consumer electronics applications, such as smartphones or low-cost wearables, where price is a major consideration. However, as the technology matures and production volumes increase, the cost of these antennas is expected to decrease. Advances in semiconductor technology, such as the development of more efficient and low-cost processors and RF components, are also helping to reduce the cost of RTK receiver modules.
Another factor that can increase the cost of using integrated embedded RTK GNSS antennas is the need for access to reference stations or network RTK services. In some cases, users may need to purchase a subscription to a network RTK service, which can add to the ongoing cost of using the antenna. However, the availability of free or low-cost network RTK services in some regions is helping to reduce this barrier.
4.2.4 Environmental Constraints
Integrated embedded RTK GNSS antennas are often used in harsh environmental conditions, such as extreme temperatures, high humidity, heavy rain, snow, dust, or vibrations, which can affect their performance and reliability. While the enclosure of the antenna is designed to protect the internal components from these environmental factors, extreme conditions can still cause damage or degradation over time.
Extreme temperatures, for example, can affect the performance of the electronic components. At low temperatures, the performance of batteries can degrade, reducing the operating time of battery-powered devices. The dielectric properties of the antenna's substrate can also change at low temperatures, affecting the antenna's radiation pattern and gain. At high temperatures, the components can overheat, leading to reduced performance or even permanent damage. The use of temperature-resistant materials and thermal management techniques can help mitigate these effects, but they can also increase the cost and complexity of the antenna.
High humidity and moisture can cause corrosion of the metal components or short circuits in the circuitry, leading to failures. The enclosure must be properly sealed to prevent moisture from entering, but seals can degrade over time, especially in applications where the antenna is exposed to frequent temperature cycles or chemical exposure. Dust and debris can also accumulate on the antenna element, reducing its ability to receive signals, and may require regular maintenance to clean.
Vibrations and shocks, which are common in applications such as construction, off-road vehicles, or drones, can cause mechanical damage to the internal components, such as loose connections, broken traces on the PCB, or damage to the antenna element. The use of vibration-damping materials and robust mounting systems can help reduce the impact of vibrations and shocks, but they can also add to the weight and size of the antenna.
To address these environmental constraints, integrated embedded RTK GNSS antennas must undergo rigorous testing to ensure that they can withstand the conditions they will be exposed to in their intended application. This testing includes environmental testing (e.g., temperature cycling, humidity testing, dust and water ingress testing) and mechanical testing (e.g., vibration testing, shock testing). However, meeting these testing standards can increase the cost and development time of the antenna.
5.1 Key Applications
Integrated embedded RTK GNSS antennas are used in a wide range of applications across various industries, thanks to their high accuracy, compact size, low power consumption, and real-time performance. The following are some of the key application areas where these antennas are making a significant impact:
5.1.1 Precision Agriculture
Precision agriculture is one of the fastest-growing application areas for integrated embedded RTK GNSS antennas. In precision agriculture, the goal is to optimize crop yields while reducing the use of resources such as fertilizers, pesticides, and water. Centimeter-level positioning accuracy provided by RTK technology allows farmers to precisely manage their fields, including tasks such as seeding, planting, fertilizing, spraying, and harvesting.
For example, in seeding and planting, integrated embedded RTK GNSS antennas can be mounted on agricultural machinery (e.g., seeders, planters) to ensure that seeds are planted in straight rows with precise spacing. This not only improves the efficiency of the planting process but also ensures that each plant has enough space to grow, reducing competition for resources. In fertilizing and spraying, the antenna can be used to create a "variable rate application" map, which allows the machinery to apply the correct amount of fertilizer or pesticide to different areas of the field based on soil conditions, crop health, and yield potential. This reduces waste and minimizes the environmental impact of agricultural chemicals.
During harvesting, integrated embedded RTK GNSS antennas can be used to track the position of the harvester and record the yield data for each section of the field. This data can be used to create yield maps, which help farmers identify areas of the field that are underperforming and make informed decisions about future crop management. Additionally, the antenna can be used to guide autonomous agricultural robots, which can perform tasks such as weeding, pruning, or monitoring crop health with high precision.
The low power consumption of integrated embedded RTK GNSS antennas is particularly beneficial in precision agriculture, as agricultural machinery and robots often operate for long hours on battery power. The compact size of the antenna also makes it easy to integrate into small agricultural devices, such as handheld soil sensors or drone-based crop monitoring systems.
5.1.2 Construction and Surveying
The construction and surveying industry has long relied on GNSS technology for positioning, but the introduction of integrated embedded RTK GNSS antennas has revolutionized the way these tasks are performed. In construction, centimeter-level accuracy is essential for ensuring that structures are built according to design specifications, avoiding costly rework and delays.
Integrated embedded RTK GNSS antennas are used in a variety of construction applications, including site layout, foundation marking, structural alignment, and as-built surveys. For site layout, surveyors use the antenna to mark the position of buildings, roads, utilities, and other infrastructure on the construction site. The high accuracy of the antenna ensures that the marks are placed exactly where they are needed, reducing the risk of errors during construction. In foundation marking, the antenna is used to ensure that the foundation of a building is level and aligned correctly, which is critical for the structural integrity of the building.
Duringthe construction phase, integrated embedded RTK GNSS antennas are used for structural alignment, such as ensuring that walls, columns, and beams are placed in the correct position and orientation. For example, in high-rise building construction, the antenna can be mounted on cranes or lifting equipment to precisely position steel beams or concrete panels, reducing the risk of misalignment and ensuring the safety of the structure. As-built surveys, which are conducted after construction is completed to verify that the structure matches the design plans, also rely on the high accuracy of these antennas. Surveyors use the antenna to measure the actual position of the structure and compare it to the design specifications, identifying any discrepancies that need to be addressed.
In traditional surveying, surveyors often used bulky, standalone RTK systems that required multiple people to operate and transport. Integrated embedded RTK GNSS antennas have changed this by enabling the development of portable, handheld surveying tools that a single surveyor can use. These handheld tools are lightweight, easy to carry, and can be quickly set up, reducing the time and labor required for surveying tasks. For example, a surveyor can use a handheld device equipped with an integrated embedded RTK GNSS antenna to measure the position of property boundaries, topographic features, or utility lines in a fraction of the time it would take with traditional equipment.
The real-time performance of these antennas is also a key advantage in construction and surveying. Surveyors can immediately view the position data on the device's screen, allowing them to make on-site adjustments and verify the accuracy of their measurements in real-time. This eliminates the need to return to the office to process data, accelerating the surveying process and reducing the risk of errors.
5.1.3 Automotive and Autonomous Vehicles
The automotive industry is increasingly adopting integrated embedded RTK GNSS antennas to support advanced driver assistance systems (ADAS) and autonomous driving technologies. Centimeter-level real-time positioning is essential for autonomous vehicles to navigate safely and accurately, especially in complex environments such as urban areas or highways with heavy traffic.
In ADAS, integrated embedded RTK GNSS antennas are used to enhance features such as adaptive cruise control, lane-keeping assist, and automatic emergency braking. For example, lane-keeping assist systems use the antenna's position data to determine the vehicle's position relative to the lane markings, and if the vehicle begins to drift out of the lane, the system can apply corrective steering to keep it on track. Adaptive cruise control systems use the position data to maintain a safe distance from the vehicle in front, adjusting the vehicle's speed based on the relative position and speed of the leading vehicle.
For fully autonomous vehicles, integrated embedded RTK GNSS antennas play an even more critical role. Autonomous vehicles rely on a combination of sensors (e.g., cameras, LiDAR, radar) and positioning systems to perceive their environment and make driving decisions. The RTK antenna provides precise position data that is used to calibrate the other sensors, align the vehicle's internal map with the real world, and ensure that the vehicle follows the correct route. For example, when an autonomous vehicle is navigating through a city, the RTK antenna's centimeter-level accuracy ensures that it can detect small changes in the road layout, such as temporary construction zones or lane closures, and adjust its route accordingly.
The compact size and low power consumption of integrated embedded RTK GNSS antennas make them suitable for integration into modern vehicles, where space and power are limited. Additionally, many automotive-grade RTK antennas are designed to withstand the harsh environmental conditions of automotive use, such as extreme temperatures, vibrations, and electromagnetic interference from the vehicle's electrical system.
To address the challenge of signal blockages in urban environments (e.g., tall buildings blocking GNSS signals), automotive RTK systems often integrate the antenna with other positioning technologies, such as inertial navigation systems (INS) or LiDAR. The INS uses accelerometers and gyroscopes to measure the vehicle's acceleration and rotation, allowing it to estimate the vehicle's position when GNSS signals are temporarily lost. LiDAR provides detailed 3D maps of the environment, which can be used to verify the vehicle's position and detect obstacles. This multi-sensor fusion approach ensures that the vehicle maintains accurate positioning even in challenging conditions.
5.1.4 Robotics and Industrial Automation
Integrated embedded RTK GNSS antennas are transforming the field of robotics and industrial automation by enabling robots to navigate and operate with high precision in both indoor and outdoor environments. In industrial settings, such as factories, warehouses, and logistics centers, robots are used for tasks such as material handling, assembly, and inventory management. Centimeter-level positioning accuracy ensures that these robots can perform their tasks efficiently and safely, reducing the risk of collisions with other robots or equipment.
In outdoor robotics applications, such as construction robots, agricultural robots, or search-and-rescue robots, integrated embedded RTK GNSS antennas are essential for navigation. For example, construction robots used for tasks such as bricklaying or concrete pouring rely on the antenna's position data to ensure that each brick or layer of concrete is placed in the correct position. Agricultural robots, such as autonomous weeding robots, use the antenna to navigate between rows of crops and target weeds with precision, reducing the need for manual labor and chemical herbicides.
Search-and-rescue robots, which are used in disaster zones to locate survivors, also benefit from the high accuracy of integrated embedded RTK GNSS antennas. These robots can be deployed in areas that are too dangerous for humans, and the antenna's position data allows rescuers to track the robot's location and guide it to areas where survivors may be trapped. The real-time performance of the antenna ensures that rescuers can make immediate decisions based on the robot's position and the data it collects.
In industrial automation, integrated embedded RTK GNSS antennas are also used for asset tracking. For example, in large warehouses or logistics centers, the antenna can be mounted on forklifts, pallets, or shipping containers to track their position in real-time. This allows warehouse managers to optimize the movement of assets, reduce inventory errors, and improve overall operational efficiency. The low power consumption of the antenna is particularly beneficial for asset tracking applications, as it allows the tracking devices to operate for long periods on battery power without the need for frequent recharging.
5.1.5 Drones and Unmanned Aerial Vehicles (UAVs)
The drone industry is one of the largest adopters of integrated embedded RTK GNSS antennas, as centimeter-level positioning is critical for a wide range of drone applications, including aerial mapping, surveying, infrastructure inspection, and delivery. Drones equipped with these antennas can fly with high stability, follow pre-defined flight paths with precision, and capture accurate data for various applications.
In aerial mapping and surveying, drones use integrated embedded RTK GNSS antennas to capture high-resolution images and generate detailed 2D or 3D maps of the terrain. The antenna's centimeter-level accuracy ensures that the images are geotagged with precise position data, allowing the maps to be used for applications such as land surveying, urban planning, and environmental monitoring. For example, in land surveying, a drone equipped with an RTK antenna can cover a large area in a short time, capturing data that would take days or weeks to collect with traditional surveying equipment.
Infrastructure inspection is another key application for drones with integrated embedded RTK GNSS antennas. Drones are used to inspect infrastructure such as power lines, bridges, wind turbines, and pipelines, which are often difficult or dangerous for humans to access. The RTK antenna's precise positioning allows the drone to fly close to the infrastructure and capture detailed images or videos of potential defects, such as cracks in bridges or damage to power lines. The real-time position data also ensures that the drone can maintain a safe distance from the infrastructure and avoid collisions.
Drone delivery is an emerging application that relies heavily on integrated embedded RTK GNSS antennas. Delivery drones need to navigate accurately from the delivery center to the customer's location, and then land precisely at the delivery spot (e.g., a backyard or a rooftop). The centimeter-level accuracy of the RTK antenna ensures that the drone can reach the correct location and land safely, even in residential areas with obstacles such as trees or buildings. The low power consumption of the antenna is also important for delivery drones, as it helps to extend the drone's flight time and increase the range of deliveries.
The compact size and lightweight design of integrated embedded RTK GNSS antennas are particularly well-suited for drones, as they do not add significant weight to the drone, which is critical for maintaining flight time and stability. Additionally, many drone-specific RTK antennas are designed to be weather-resistant, allowing them to operate in rain, snow, or high winds.
5.2 Future Trends
The field of integrated embedded RTK GNSS antennas is evolving rapidly, driven by advances in technology, increasing demand for high-accuracy positioning, and the expansion of new applications. The following are some of the key future trends that are expected to shape the development and adoption of these antennas:
5.2.1 Integration with 5G and Next-Generation Communication Technologies
The integration of integrated embedded RTK GNSS antennas with 5G and next-generation communication technologies is expected to revolutionize real-time positioning. 5G networks offer several advantages that are beneficial for RTK systems, including high data transfer rates, low latency, and wide coverage. These features allow for faster and more reliable transmission of RTK correction data, enabling the antenna to achieve even higher accuracy and update rates.
For example, 5G's low latency (typically less than 10 milliseconds) ensures that the correction data is transmitted to the rover (the integrated embedded antenna) almost instantaneously, reducing the time delay between the measurement of the error at the reference station and the application of the correction at the rover. This is particularly important for dynamic applications such as autonomous vehicles or drones, where even small delays in positioning data can lead to safety risks.
5G's high data transfer rates also allow for the transmission of more detailed correction data, such as high-resolution ionospheric or tropospheric models, which can further improve the accuracy of the RTK positioning solution. Additionally, 5G's wide coverage ensures that the antenna can receive correction data even in remote areas, expanding the range of applications for integrated embedded RTK GNSS antennas.
In the future, we can expect to see more integrated embedded RTK GNSS antennas that are designed to work seamlessly with 5G networks, and even the development of 5G-enabled RTK reference stations that can provide high-quality correction data to a large number of rovers simultaneously. This integration will also enable new applications, such as collaborative positioning, where multiple devices (e.g., autonomous vehicles, drones, or robots) share their position data via 5G to improve the overall positioning accuracy and reliability of the system.
5.2.2 Miniaturization and Cost Reduction
As semiconductor technology continues to advance, the miniaturization of integrated embedded RTK GNSS antennas is expected to accelerate. The development of smaller, more efficient components (e.g., low-power processors, compact RF front-ends, and miniaturized antenna elements) will allow for the creation of even smaller and lighter RTK antennas, making them suitable for integration into an even wider range of devices, such as wearable electronics, small IoT sensors, or medical devices.
For example, miniaturized RTK antennas could be integrated into wearable devices for outdoor sports, such as hiking or running watches, providing users with precise position data for navigation or tracking their performance. In medical devices, such as implantable sensors or portable health monitors, miniaturized RTK antennas could be used to track the position of the device or the patient, enabling new applications in telemedicine or emergency response.
Along with miniaturization, the cost of integrated embedded RTK GNSS antennas is expected to decrease significantly in the coming years. This is due to several factors, including the increased production volume of RTK components, the development of more cost-effective manufacturing processes, and the integration of multiple functions into a single chip (system-on-chip, SoC) design. The SoC design approach combines the RTK receiver, signal processing circuitry, and power management components into a single integrated circuit, reducing the number of components required and simplifying the manufacturing process.
Lower costs will make integrated embedded RTK GNSS antennas more accessible to cost-sensitive applications, such as consumer electronics (e.g., smartphones, tablets) or low-cost IoT devices. For example, future smartphones could include integrated RTK antennas, enabling users to access centimeter-level positioning for applications such as augmented reality (AR) navigation, precise location-based services, or outdoor gaming.
5.2.3 Multi-Sensor Fusion for Enhanced Reliability
Multi-sensor fusion, which combines data from multiple sensors (e.g., GNSS, INS, LiDAR, cameras, or radar) to improve positioning accuracy and reliability, is expected to become a standard feature of integrated embedded RTK GNSS antennas. This approach addresses the limitations of standalone GNSS positioning, such as vulnerability to signal blockages or interference, by using other sensors to provide backup positioning when GNSS signals are compromised.
For example, when an integrated embedded RTK GNSS antenna is used in an urban environment with tall buildings, the GNSS signals may be temporarily blocked, leading to a loss of positioning accuracy. In this case, an INS integrated with the antenna can use accelerometers and gyroscopes to measure the device's movement and estimate its position until the GNSS signals are recovered. LiDAR or cameras can also be used to capture images of the environment, which can be compared to a pre-built map to verify the device's position and correct any errors in the INS or GNSS data.
Multi-sensor fusion also enables new capabilities, such as indoor-outdoor seamless positioning. While GNSS signals are typically not available indoors, other sensors such as Wi-Fi, Bluetooth, or ultra-wideband (UWB) can be used to provide indoor positioning. An integrated embedded RTK GNSS antenna with multi-sensor fusion can switch between GNSS (for outdoor positioning) and other sensors (for indoor positioning) seamlessly, providing continuous positioning as the device moves from indoor to outdoor environments.
In the future, we can expect to see more integrated embedded RTK GNSS antennas that include built-in support for multi-sensor fusion, with software algorithms that automatically combine data from different sensors to optimize positioning performance. This will make the antennas more reliable and versatile, suitable for a wider range of applications, including those in challenging environments such as urban canyons, tunnels, or indoor spaces.
5.2.4 Increased Adoption of Network RTK and PPP-RTK
Network RTK, which uses a network of reference stations to provide regional correction data, and Precise Point Positioning-RTK (PPP-RTK), which combines the advantages of PPP and RTK to provide centimeter-level accuracy without the need for a local reference station, are expected to see increased adoption in the coming years. These technologies address the key challenge of integrated embedded RTK GNSS antennas: dependence on a single reference station and reliable data link.
Network RTK systems cover a large area (often hundreds or thousands of square kilometers) with a network of reference stations, which transmit their correction data to a central processing center. The central processing center combines the data to generate a regional correction model, which is then transmitted to the rovers (integrated embedded antennas) via a wireless data link. This approach provides more accurate and reliable correction data than single-base RTK, as it accounts for spatial variations in errors (e.g., ionospheric or tropospheric delays) across the coverage area. Additionally, network RTK is less vulnerable to the failure of a single reference station, as the network can continue to operate even if one or more reference stations are offline.
PPP-RTK is an emerging technology that offers even greater flexibility. Unlike traditional RTK, which requires a reference station within a short distance of the rover, PPP-RTK uses global or regional correction data (e.g., from a network of reference stations or satellite-based augmentation systems) to provide centimeter-level accuracy. This eliminates the need for a local reference station, making PPP-RTK suitable for applications in remote areas where reference station infrastructure is lacking. PPP-RTK also has a faster convergence time (the time it takes to achieve centimeter-level accuracy) than traditional PPP, making it suitable for real-time applications.
In the future, we can expect to see more integrated embedded RTK GNSS antennas that support both network RTK and PPP-RTK, allowing users to choose the most suitable correction data source based on their location and application requirements. This will expand the coverage area of RTK technology and make it more accessible to users in remote or underserved regions.
5.2.5 Enhanced Security Against Jamming and Spoofing
As the use of integrated embedded RTK GNSS antennas becomes more widespread, the risk of intentional jamming and spoofing attacks is increasing. Jamming involves transmitting strong radio signals to disrupt GNSS reception, while spoofing involves transmitting fake GNSS signals to trick the antenna into computing an incorrect position. These attacks can have serious consequences, especially in critical applications such as autonomous vehicles, aviation, or military operations.
To address this risk, future integrated embedded RTK GNSS antennas will include enhanced security features to detect and mitigate jamming and spoofing. One such feature is cryptographic authentication of GNSS signals, which uses digital signatures to verify the authenticity of the signals received from satellites. This ensures that the antenna only processes signals from legitimate satellites, preventing spoofing attacks.
Another approach is the use of adaptive beamforming antennas, which can focus their reception on the direction of the legitimate GNSS satellites and reject signals from other directions (e.g., jamming signals). Adaptive beamforming uses an array of antenna elements and advanced signal processing algorithms to adjust the radiation pattern of the antenna in real-time, improving the signal-to-noise ratio and reducing the impact of jamming.
Additionally, the integration of alternative positioning technologies (e.g., INS, LiDAR, or cameras) can provide a backup positioning solution if the GNSS signals are jammed or spoofed. For example, if an autonomous vehicle's RTK antenna detects a jamming attack, it can switch to using LiDAR and cameras to navigate until the jamming is stopped.
In the future, we can expect to see more collaboration between GNSS satellite operators, antenna manufacturers, and cybersecurity companies to develop industry standards for GNSS security. This will ensure that integrated embedded RTK GNSS antennas meet high security standards and can withstand increasingly sophisticated jamming and spoofing attacks.
Conclusion
6.1 Summary of Key Findings
Integrated embedded RTK GNSS antennas represent a significant advancement in high-precision positioning technology, combining the accuracy of RTK with the compactness, low power consumption, and easy integration of embedded systems. Throughout this series, we have explored the various aspects of these antennas, from their definition and evolutionto their design, working principles, advantages, challenges, applications, and future trends.
In the overview, we defined integrated embedded RTK GNSS antennas as compact, all-in-one units that merge GNSS signal reception, RTK correction processing, and embedded system functionality—addressing the limitations of traditional standalone RTK systems, which were bulky, power-hungry, and difficult to integrate. We also traced their evolution, noting how advancements in microelectronics (e.g., miniaturized RF components, low-power processors) and the rise of IoT, autonomous systems, and precision industries drove their development. The market context highlighted their rapid growth, fueled by demand across agriculture, construction, automotive, and robotics, with a projected CAGR that underscores their increasing relevance.
The design and construction section delved into the technical intricacies of these antennas, emphasizing the critical role of each component. The antenna element—typically a multiband microstrip design—was shown to be optimized for wide frequency coverage (supporting GPS, GLONASS, Galileo, and BeiDou) and low-profile integration, with substrate choices (e.g., Rogers 4350, Teflon) balancing miniaturization and signal efficiency. The RTK receiver module, with its RF front-end (low-noise amplifiers, mixers), baseband processor (code correlation, navigation data decoding), and RTK engine (least squares adjustment, Kalman filtering), was identified as the "brain" that enables centimeter-level accuracy. PCB layout and shielding were highlighted as essential for minimizing EMI and signal interference, while enclosure design addressed environmental resilience (IP ratings, temperature resistance) to ensure performance in harsh conditions.
In working principles, we broke down how these antennas transform weak GNSS signals into precise position data. Starting with basic GNSS positioning—relying on pseudorange measurements from at least four satellites—we explained how RTK technology elevates accuracy by leveraging correction data from reference stations to cancel common errors (ionospheric delay, satellite clock drift). The signal flow, from antenna reception to RF processing, baseband decoding, correction application, and position calculation, illustrated the real-time synergy between hardware and software. We also noted key performance factors, such as signal visibility, correction data quality, rover-reference station distance, and environmental interference, which directly impact positioning reliability.
The advantages and challenges section balanced the strengths and limitations of these antennas. Their key benefits—centimeter-level accuracy, compact size, easy integration (via standard interfaces like UART/SPI), low power consumption (critical for battery-powered devices), and real-time performance—make them indispensable for precision-driven applications. However, challenges persist: dependence on reference stations and data links (limiting use in remote areas), vulnerability to signal blockages (urban canyons, foliage) and interference (jamming, spoofing), higher costs compared to standard GNSS antennas, and environmental constraints (extreme temperatures, vibrations). These challenges, while significant, are not insurmountable and are driving ongoing innovation.
The applications section showcased the versatility of integrated embedded RTK GNSS antennas across industries. In precision agriculture, they enable variable-rate farming (fertilizer application, seeding) and yield mapping, boosting efficiency and sustainability. In construction and surveying, they power portable handheld tools and crane-mounted systems, reducing labor and rework. In automotive and autonomous vehicles, they support ADAS features (lane-keeping, adaptive cruise control) and enable safe navigation via multi-sensor fusion (with INS/LiDAR). In robotics, they ensure precise movement for industrial automation, agricultural robots, and search-and-rescue drones. The drone industry, in particular, relies on these antennas for aerial mapping, infrastructure inspection, and delivery—where their lightweight design and weather resistance are critical.
Finally, the future trends section outlined the direction of innovation: integration with 5G (low latency, high data rates for faster corrections), further miniaturization and cost reduction (enabling consumer electronics adoption), multi-sensor fusion (seamless indoor-outdoor positioning), wider adoption of network RTK and PPP-RTK (expanding coverage to remote areas), and enhanced security (cryptographic authentication, adaptive beamforming to counter jamming/spoofing). These trends are poised to unlock new applications and address existing limitations, solidifying the role of integrated embedded RTK GNSS antennas in the future of positioning technology.
6.2 Industry Impact and Value
Integrated embedded RTK GNSS antennas are not just technical innovations—they are catalysts for transformative change across industries, driving efficiency, sustainability, and safety. Their impact is most evident in sectors where precision directly translates to economic value or operational success.
In agriculture, for example, these antennas enable "precision farming 2.0," where resources are allocated with unprecedented accuracy. By reducing fertilizer and pesticide use by 10–30% (per industry studies), they lower operational costs for farmers while minimizing environmental impact—aligning with global sustainability goals to reduce agricultural runoff and carbon footprints. In construction, the ability to complete surveys 50% faster and reduce rework by up to 20% cuts project timelines and costs, addressing a key pain point in an industry plagued by delays. For autonomous vehicles, centimeter-level positioning is a linchpin for safety: without it, self-driving cars cannot reliably navigate complex urban environments, making these antennas essential for the mass adoption of autonomous mobility.
Beyond direct operational benefits, these antennas also enable new business models. In logistics, real-time asset tracking with RTK accuracy allows companies to optimize supply chains by reducing inventory loss and improving delivery speed. In drone services, precise positioning opens up new revenue streams, such as high-resolution mapping for urban planning or automated inspection of wind turbines—services that were previously too costly or time-consuming with traditional tools. For IoT applications, low-power RTK antennas enable long-lasting, precise sensors for smart cities (e.g., traffic management, waste monitoring) and environmental monitoring (e.g., glacier tracking, wildlife conservation).
6.3 Final Outlook
As we look ahead, integrated embedded RTK GNSS antennas are set to become a foundational technology for the "precision economy"—a future where high-accuracy positioning is as ubiquitous as Wi-Fi or Bluetooth. The trends outlined earlier—5G integration, miniaturization, multi-sensor fusion—will not only address current challenges but also unlock applications we can barely imagine today: wearable devices that track hikers’ positions with centimeter accuracy for safety, medical drones that deliver organs with pinpoint precision, or smart infrastructure that monitors structural health in real-time using embedded sensors.
However, realizing this potential will require collaboration across stakeholders. GNSS satellite operators must continue to enhance signal quality and security (e.g., Galileo’s Public Regulated Service, GPS III). Antenna manufacturers must balance performance with cost to make RTK accessible to consumer markets. Governments and private entities must invest in reference station networks to expand coverage, especially in underserved regions. And cybersecurity firms must develop robust defenses against jamming and spoofing, which pose growing risks as these antennas are adopted in critical infrastructure.
In conclusion, integrated embedded RTK GNSS antennas represent a pivotal advancement in positioning technology. Their ability to deliver centimeter-level accuracy in a compact, low-power, integrable form factor has already transformed industries—and their best applications are still to come. As technology evolves and challenges are addressed, these antennas will play a central role in shaping a more precise, efficient, and safe world. Whether in the fields, on the roads, in the skies, or in our daily lives, integrated embedded RTK GNSS antennas are not just tools—they are enablers of a future where precision is the standard.

 86 0755 2819 9597
86 0755 2819 9597
Lucy Yang | lucy.y@toxutech.com
Nicole Li | nicole@toxutech.com
Dotty Zhao | sales04@toxutech.com
Global Business Director / Sales Team / Global Operations










 En
En Cn
Cn Korean
Korean Home >
Home > 


